Thanks.
As I recall, one of the reasons I didn't go down this path was that it required usb power. But that's neither here nor there. ![]()
Thanks.
As I recall, one of the reasons I didn't go down this path was that it required usb power. But that's neither here nor there. ![]()
I suppose you can use a solar-powered battery pack with/ 5V output .... There are a lot of solar-powered batteries sold on Amazon and AE.
I received mine last Friday and started testing it as soon as I unpacked it.
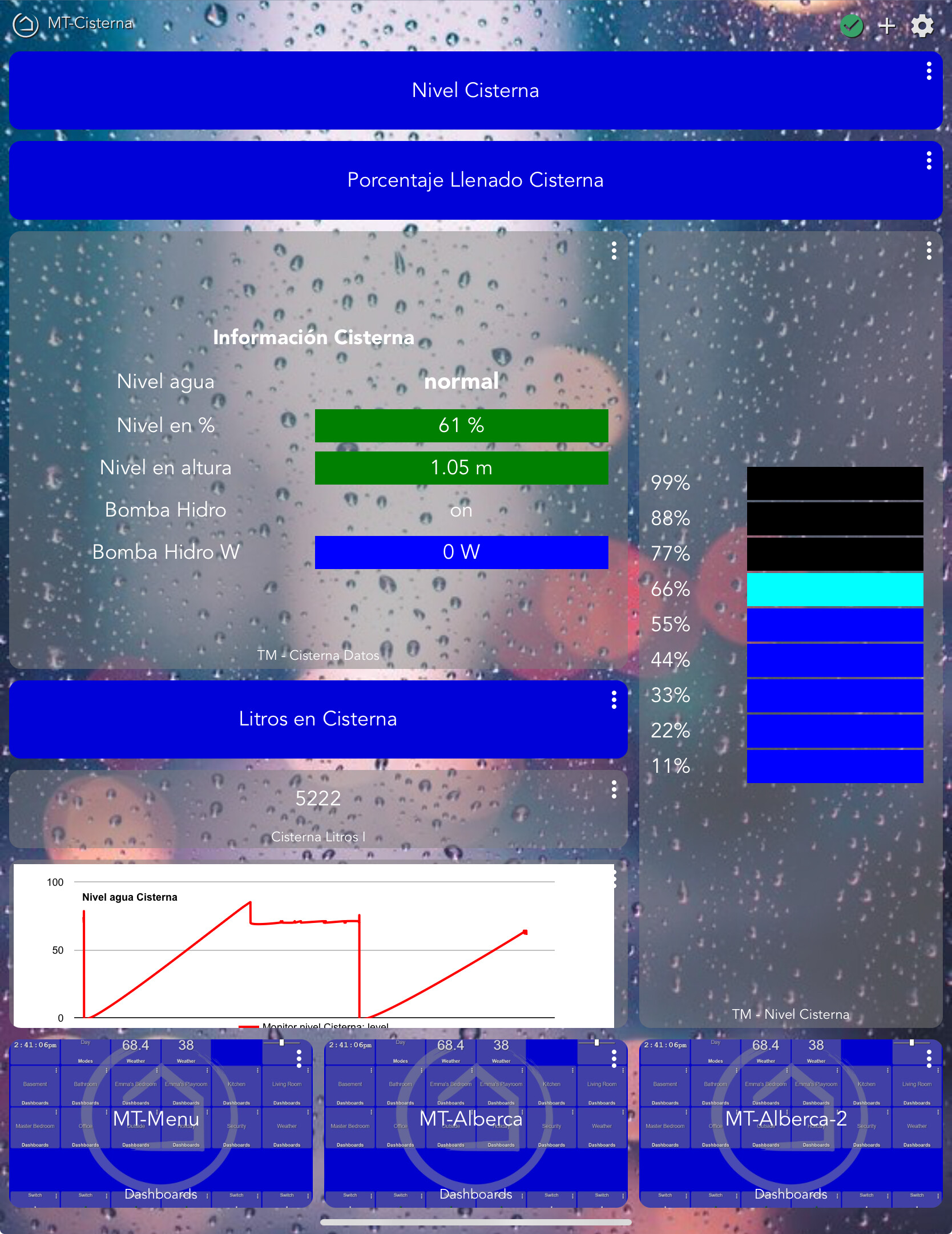
It’s pretty straightforward, and I already designed my mobile phone dashboard to see what this toy can tell us.
My level graph needs a lot of improvement. I’m trying to make it with webCoRe Graph tool but not there yet. (Any suggestions are welcome).
Now comes the “easy” part, installing it on its planned place.
It’s going to be a challenge!
This dashboard tells me level status, level (%), level (height), water pump (on/off), and even total water in the deposit, in liters.
I pulled the trigger and now have device in hand. I think it could work for the purpose of snow depth measurement, so looking forward to trying it.
Obviously measuring this would be slightly different as I am essentially reversing the measurement, so therefore I am curious if it would be possible to also change the measurements/driver to reflect this, or add an option to further customize it?
In reality, I can make due with liquiddepth, and use it directly, but it would be great if one could choose the "resolution" and type. i.e. if mounted at 0.8 meters, a measurement of 0.10 is 10 centimeters, so that would be great if I could report that "liquidDepth: 10 cm".
liquidState could also be shown as little, medium, heavy, impassable or whatever comes to mind, also in reverse.
Is that something that is possible?
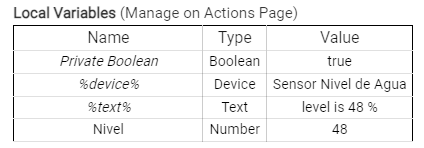
My opinion is that you can do lots of things with this device, but you will have to do some programming with variables, math and creativity with RM app.
I was going to propose exactly the same approach. Install this driver :
Create one or more virtual devices of a "Generic Attribute Storage Driver" type.
Then, use RM5 to 'post-process' the attributes for any physical device, using any existing driver (no matter custom or system driver). Create a rule that triggers from the physical device attribute change, then add some math/logic and update the attribute of the virtual device.
In your particular use case - you can convert the Tuya Zigbee Tank Level Monitor'' attribute from meters to inches (EDIT: oops, sorry - I forgot that you are in Europe! ![]() ), create a new virtual 'little, medium, heavy, impassable' attribute and set its string value depending on the 'raw' values from the real device.
), create a new virtual 'little, medium, heavy, impassable' attribute and set its string value depending on the 'raw' values from the real device.
Update: as prompted by @sburke781 , using Hub Variables instead of a virtual device w/ custom driver may be even better approach.
Thanks for the ideas. I will certainly look into them.
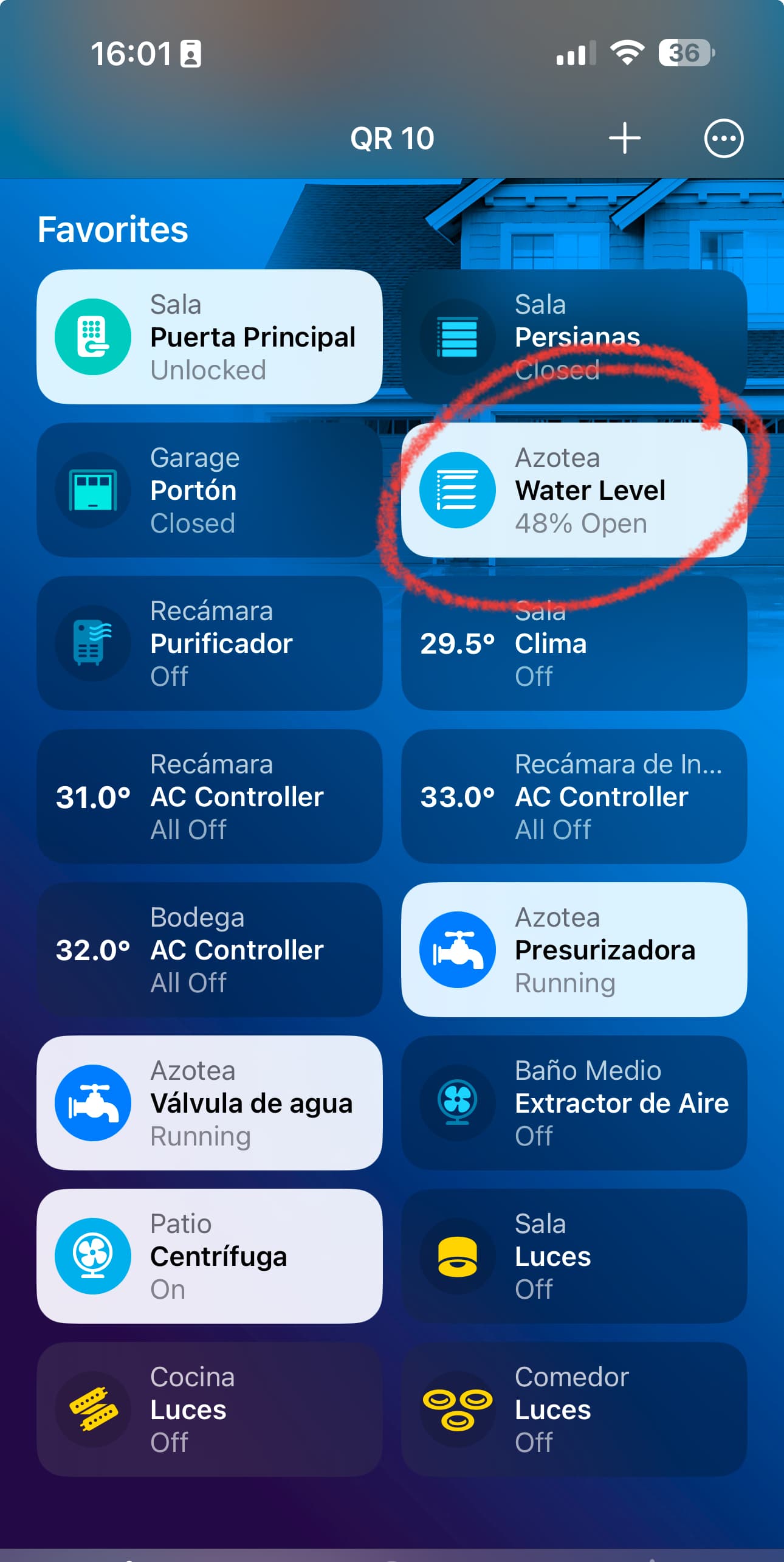
I followed up my own idea and now the EPTTECH device is installed on second floor watertanks and displayed on Homekit:
Sensor was recognized by C8 hub in the first try and the Set up was pretty straightforward ("liquid depth" must be configured in meters while "installation height" in milimeters ![]() )
)
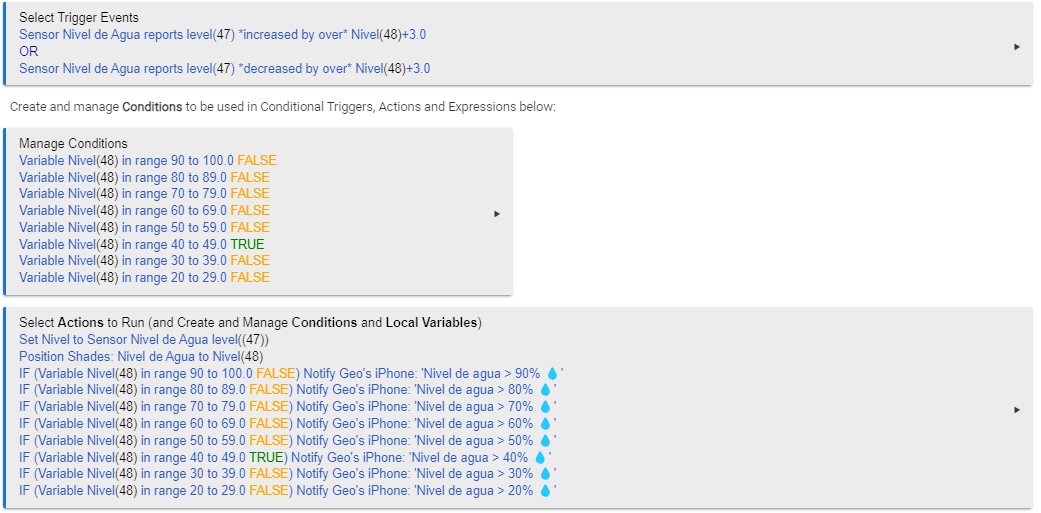
Finally, because im using Homekit to control devices, a "virtual shade device" was created powered by a rule as follow:
Hope it helps you guys
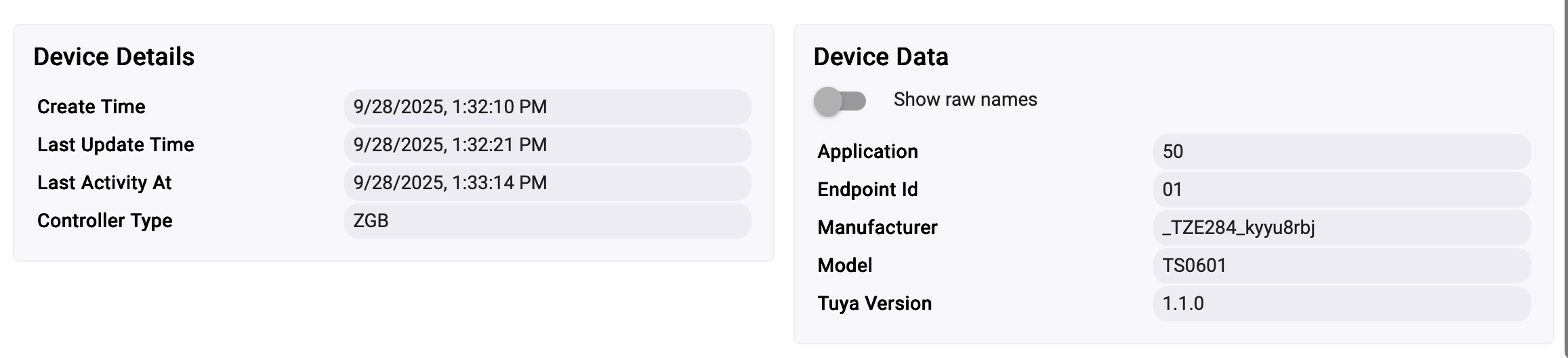
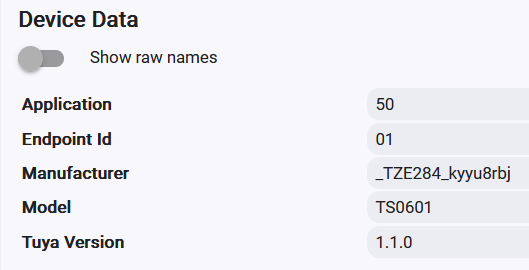
I just paired up one of the Tuya tank level monitors and ran into a problem: I can't set the "installationHeight" to any non-zero value -- I type 2.9 (my garage ceiling height in meters; I'm going to use these as automobile "presence" detectors) and the number changes to 0.0 as soon as I move the cursor out of the data field. Details of my Device Data below.
Any suggestions on how to fix this?
I can reproduce the problem. Something got changed again in the latest HE platform versions UI …
My other drivers with Decimal type preferences are not working also... ![]()
Info for developers: the problem was in the decimal type ranges definitions used in this driver :
input name: 'prefDecimal', type: 'decimal', title: 'decimal', description: 'enter a decimal to test', defaultValue: 1.234, range: '-9.999..9.999'
Obviously, the format for defining decimal ranges of a preference is not supported in HE (should be an integer range!). The difference is that HE platform versions before 2.4.1.x were ignoring the '-9.999..9.999' parsing error, while the latest versions are zeroing the preference.... Changing the ranges limits to integers fixes the problem:
input name: 'prefDecimal', type: 'decimal', title: 'decimal', description: 'enter a decimal to test', defaultValue: 1.234, range: '-10..10'
I have pushed an update via HPM - ver. 3.4.0 2025-04-25 - HE platfrom version 2.4.1.x decimal preferences range patch/workaround.
Thank you! The fix worked for me. I have mounted my Tuya level sensor on my garage ceiling at 2.9m and can clearly distinguish the distance to my parked car (1.53m) and the floor.
My current rule turns on the garage interior light when the garage door opens (via a Third Reality contact sensor in a pivoting mount) and no car is present OR during a defined darkness period.
When I mount the 2nd sensor over my wife's car, I'll update the rule to turn on the garage interior light when the garage door opens and no more than 1 car is present (i.e., 0 or 1 car may be present) OR during a defined darkness period. Stated another way, opening the garage door outside of the darkness period does not cause the light to go on if both cars are present.
Hoping someone can shed light on the following mis-behavior: my Tuya tank level sensor rapidly bounces between a liquidDepth of 1.53m/1.54m (which is the correct distance between my ceiling-mounted sensor and my car) and various other wildly different values ( -0.64m, 5.0m, 0.45m). Report times are 10s, 20s, or 30s apart.
level 0 % level is 0 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:54.611 pm
liquidDepth -0.64 m liquidDepth is -0.64 m physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:54.468 pm
liquidState low liquidState is low physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:54.307 pm
level 52 % level is 52 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:44.959 pm
level 53 % level is 53 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:34.768 pm
liquidDepth 1.54 m liquidDepth is 1.54 m physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:34.668 pm
liquidState high liquidState is high physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:34.521 pm
level 15 % level is 15 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:14.979 pm
liquidDepth 0.45 m liquidDepth is 0.45 m physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:14.642 pm
liquidState normal liquidState is normal physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:14.319 pm
level 100 % level is 100 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:05.203 pm
liquidDepth 5.0 m liquidDepth is 5.0 m physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:04.529 pm
liquidState high liquidState is high physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:26:04.351 pm
level 0 % level is 0 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:54.616 pm
liquidDepth -0.64 m liquidDepth is -0.64 m physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:54.442 pm
liquidState low liquidState is low physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:54.302 pm
level 100 % level is 100 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:44.426 pm
liquidDepth 5.0 m liquidDepth is 5.0 m physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:44.305 pm
level 52 % level is 52 % physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:34.676 pm
liquidDepth 1.53 m liquidDepth is 1.53 m physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:34.445 pm
liquidState high liquidState is high physical Ultrasonic Distance Sensor - Garage North 4/26/2025 5:25:34.320 pm
It looks like the problem resolved "itself" (after hitting Configure and Refresh about 50 times). I also moved the first sensor (North) about 8 inches so that its cone of sound waves hit the car roof more squarely (rather than the front window).
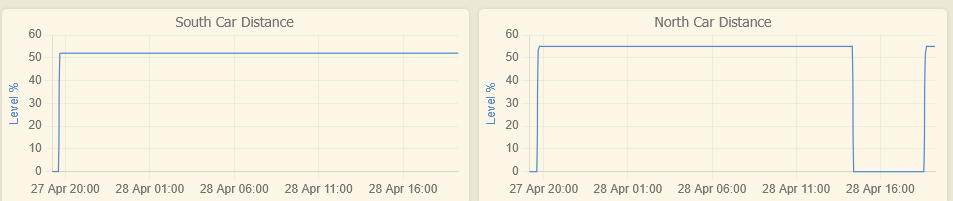
The first sensor and second sensor (South) now measure about +/- 0.5 cm (there is jitter between, for example, 1.53m and 1.54m for a car present, or 0.0m or -0.01m for the floor, with the sensor mounted at 2.91m).
I use the Watchtower app to track the Level parameter for both sensors starting last night. The North car left today for a few hours. Here's the trace:
Looking at the logs, I'm not seeing rapid bounces between wildly different liquidDepth values. So the sensor is working (for now) as hoped, and I can write my rule for controlling the garage lights based on car presence or absence.
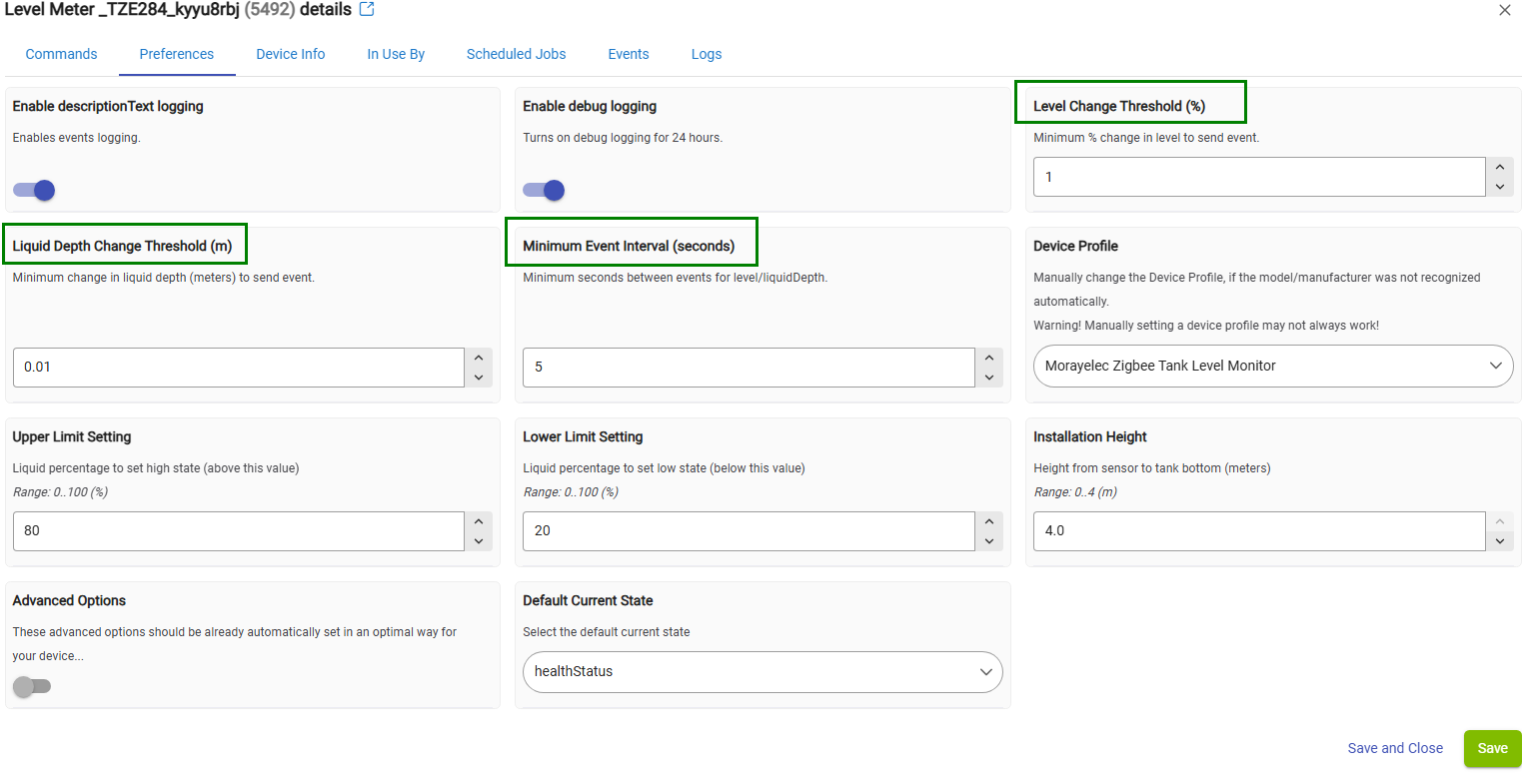
Is there any way to adjust the device report frequency or threshold? When it is right between two values it spams the zigbee network.
It is not possible to configure the frequency of the Zigbee messages sent by this Tuya device, as the reporting periods are fixed in the firmware..
I have added configurable filtering options in version 3.4.1 2025/07/27 6:13 PM :
Please update the driver manually (or perform an HPM 'Repair') and let me know the result.
As an update to my experience:
The liquidDepth reading on both of my garage ceiling ultrasonic transducers* would bounce between 2 close values (e.g., 1.52 and 1.53). The new update from Krassimir Kossev reduces the excessive logging for that problem
I was also getting spurious values of 5m (my ceiling is 2.91m from the floor). So I wrote a rule that filtered out those values, normalized all liquidDepth readings to be between 0 and 100%, and set a virtual omni sensor to "arrived" or "departed" based on a threshold value that works for me (I'm just trying to see if a car is parked in a garage bay or not).
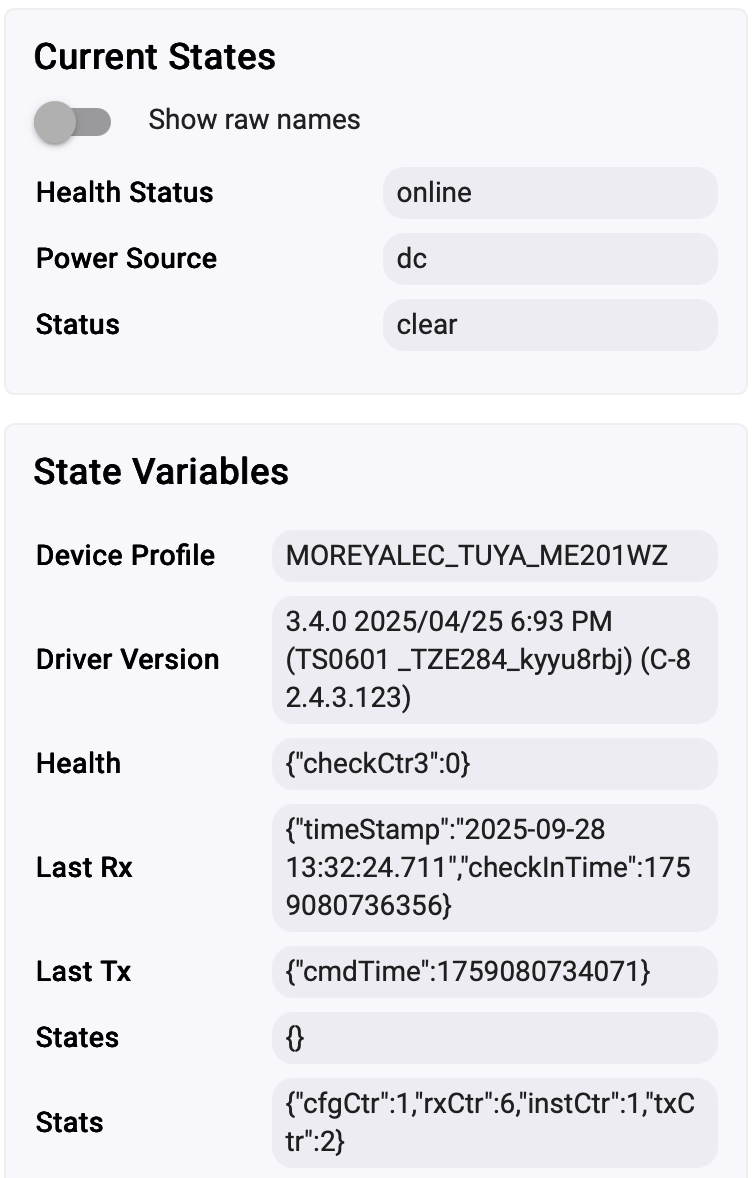
*Moraylec ME201WZ copy, made by _TZE284_kyyu8rbj using Tuya TS0601
Stopped the constant logging so it is probably better on hub load even if it is not helping the zigbee network. Hopefully the device makers keep an eye on stuff like this and can release a new firmware with threshold settings for reports so it plays nicer on the network.
I am trying to install one of the ME201WZ sensors at our shore house and was looking for input. Here are the steps I took:
Tested at home. Connected to Hubitat C8 and got it working fine through Zigbee.
Brought the C8 and the sensor the shore house. I had been running the shore house on a C5 and upgraded it to the C8. There are no other zigbee devices on the C8.
I have then tried to add this device to the hub repeatedly. It does add but it always ends with the Red LED flashing slowly which the manual says means it is in Zigbee config mode.
I have tried removing it. Rebooting the hub, Running Configure, Loading defaults, refresh, etc. But it never seems to go out of blinking mode.
I have tried right on top of the hub - a couple of feet away, further. etc.
This is what I see in the driver:
Try this process, since this is a Tuya device:
Download the Hubitat app