Yes, refreshing it does not change the fact that it will either display "opening" or "closing" even when it's not in the process of opening/closing, but rarely will it display "open" or "closed" reflecting the actual position of the blinds.
One thing I noticed is that the position is currently reads as "0" which I think is correct - 0 means closed and currently my blinds are closed, but it won't actually display "closed."
Como lo hicistes? Me acaba de llegar y no sé cómo establecer la posicion de subida i bajada, podrías ayudarme?
Hello friends, how do I configure the limit of upload and download? I'm going crazy and I don't know how to do it
How did you do to set the limits to go up and down?
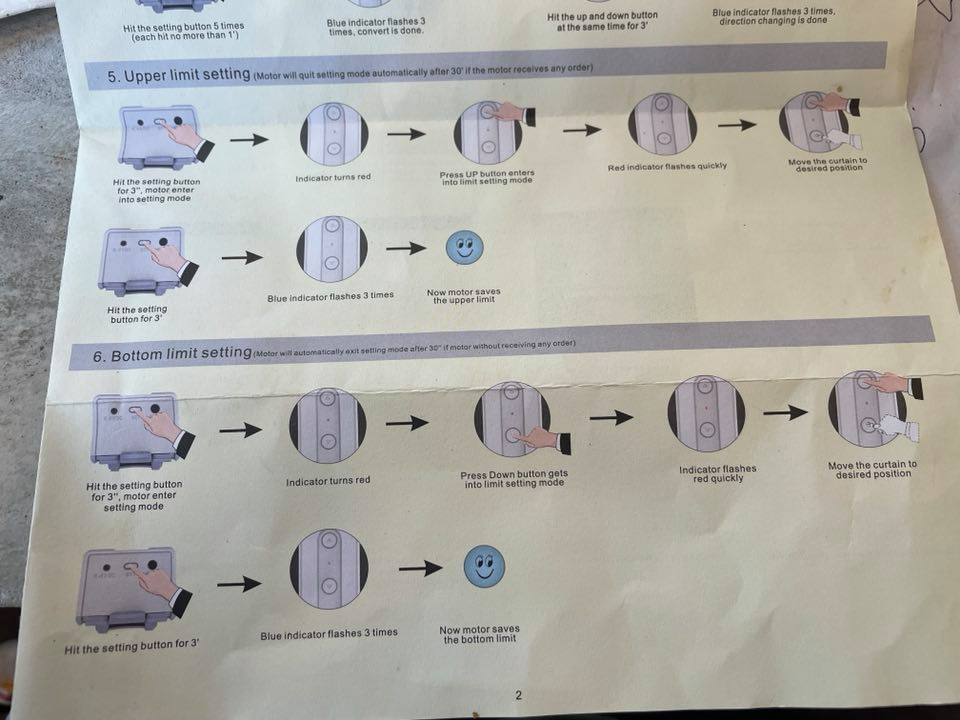
It's right in the manual step by step on second page. Also depending on orientation of the motor you can reverse it...
Yes, but I don't see how to set the limits of ascent and descent, I don't know how to do it, I'm going crazy
I thought it was configured in hubitat, I will search online how to do it, thank you very much friend
No. Limits are not done in hubitat, they are done on the unit itself. Follow the instructions in the pic above to set the limits. Once those are set, then you can set everything else through the driver.
I have seen in a YouTube video that you have to give the button where I want the blind to stop, hit set, bottom and center and it stays saved, but it doesn't work for me, the buttons change direction, I'm lost
You have to set the device in config mode first.
I could already do it! good, everything perfect, thank you guys
good guys I have another problem, on the dashboard I get that I have the blind at 0% and when I raise it to 100, but when I exit and re-enter it keeps going to 0, no matter where I have it, what do I do wrong?
Question - does it help to pair these devices right next to my Hubitat instead of their final location?
I remember being told to do this with Zigbee motion sensors.
It's better to pair where you want them so they can properly join the mesh but when setting up your mesh for the 1st time it's better to start pairing those closest to the hub and working your way out with either zigbee or z-wave
friends could you help me? It does not set the position of my blind, I get 0, it is up or down, how could I solve this problem?
Are you talking about stepping?
step on what? I have a blind and in hubitat or alexa I get the percentage of the blind it goes to 0, it does not matter if I have it up or down, I want to know how to set the percentages so that you can tell me
There is a step up and step down function in the driver. there really isn't a percentage.