I appreciate you fixing this so quickly ![]() However, in my humble opinion, the fix has some bugs that need attention.
However, in my humble opinion, the fix has some bugs that need attention. ![]()
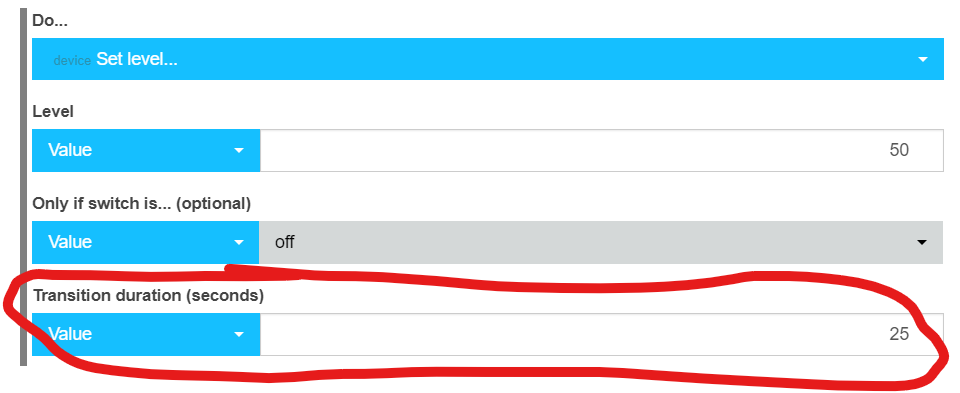
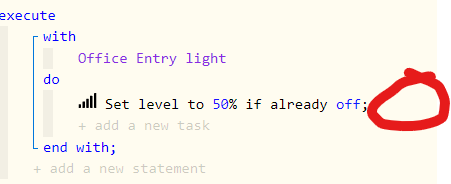
In the webCoRE main code, it now accepts the optional "duration" parameter. That is good. But it doesn't display the value in the editor. This is mostly a cosmetic bug because the command does seem to work with the duration setting even though it doesn't show it in the editor.
Here is my suggestion to fix the code:
Line 3462 you have:
setLevel: [ n: "Set level...",i: 'signal',d: "Set level to {0}%{1}",a: sLVL,p: [[n:"Level",t:sLVL], [n:sONLYIFSWIS, t:sENUM,o:[sON,sOFF], d:sIFALREADY],[n:"Transition duration (seconds)", t:sINT]], ],
I suggest changing it to this:
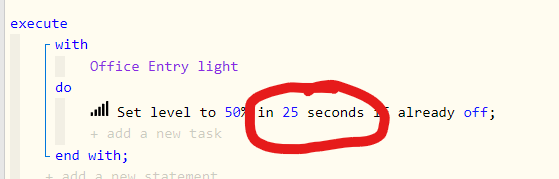
setLevel: [ n: "Set level...",i: 'signal',d: "Set level to {0}%{2}{1}",a: sLVL,p:[n:"Level",t:sLVL], [n:sONLYIFSWIS, t:sENUM,o:[sON,sOFF], d:sIFALREADY],[n:"Transition duration (seconds)", t:sINT, d:" in {v} seconds"]], ],
That will make it display like this:
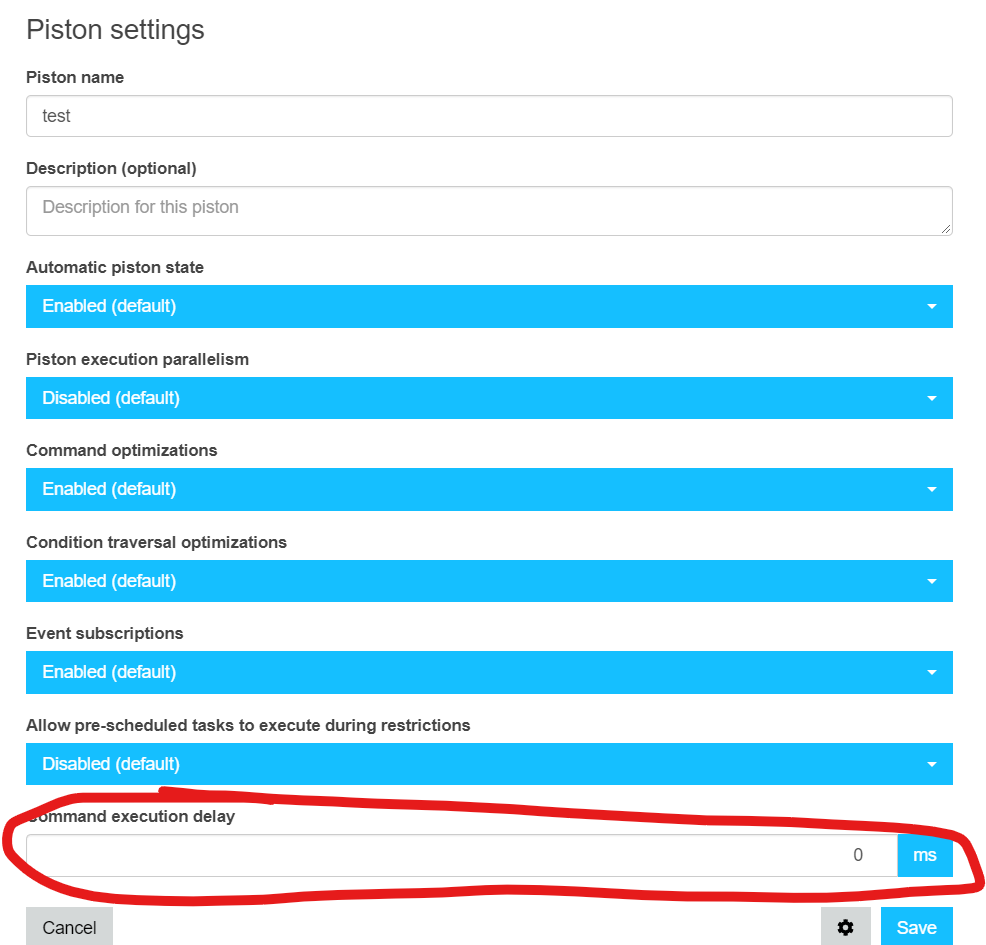
Also, in the webCoRE-Piston code, it appears that you re-used the global 'delay' variable to hold the local 'duration' value. I think this could be a problem for people who use the Piston Execution Delay option. I'm new to the webCoRE code, so I may be interpreting this wrong. But I believe the global 'delay' variable is used across multiple commands to specify a delay in milliseconds between command executions and you don't want to over-write it with the setLevel 'duration' value. The global 'delay' value is a Piston Execution Setting found here:
On lines 3417-3421 you have:
Long delay=psz>2 ? (Long)params[2]:0L
if(attr==sSTLVL && delay>0){ // setLevel takes seconds duration argument (optional)
List larg=[arg, delay.toInteger()]
executePhysicalCommand(rtD,device,attr,larg)
}else executePhysicalCommand(rtD,device,attr,arg, delay)
That causes the global piston execution 'delay' variable name to get replace with the setLevel variable params[2] (transition duration) and that will bypass any global piston execution delay that may already be set.
My suggestion is to create a local 'duration' variable name instead of using the global 'delay' name. Then you can pass in the optional duration value as well as the global delay value and also preserve the piston delay for non setLevel commands
Long duration=psz>2 ? (Long)params[2]:0L
if(attr==sSTLVL && duration>0){ // setLevel takes seconds duration argument (optional)
List larg=[arg, duration.toInteger()]
executePhysicalCommand(rtD,device,attr,larg, delay)
}else executePhysicalCommand(rtD,device,attr,arg, delay)