I'm not a programmer by trade, but one thing I'm noticing is that there are many cloud integrations being built for multi-device services, ex. Tuya, Shark, iRobot. One thing absent from this are generic component drivers that these integrations can use to control vacuum robots. Most of the bots use a similar set of commands and the onus should be hubitat to a least build a generic driver or at least give out a template for coding one that users could customize to their own device.
I do not work for HE nor do I claim to speak for them, but their typical approach to cloud-primary smart devices (like wifi devices) is to only consider an integration if a usable public API is available since Hubitat cannot connect directly to any wifi devices.
Any robot-vac integrations available now for HE are community developed, so you can try using one of those, or you are welcome to develop your own, or if a desired integration exists with Home Assistant, you can bridge it in from there.
Or if a desired integration exists with Alexa, you can bridge it in from there. That's what I do. I have virtual contacts for the several common tasks. When we are away, both vacs start making their rounds.
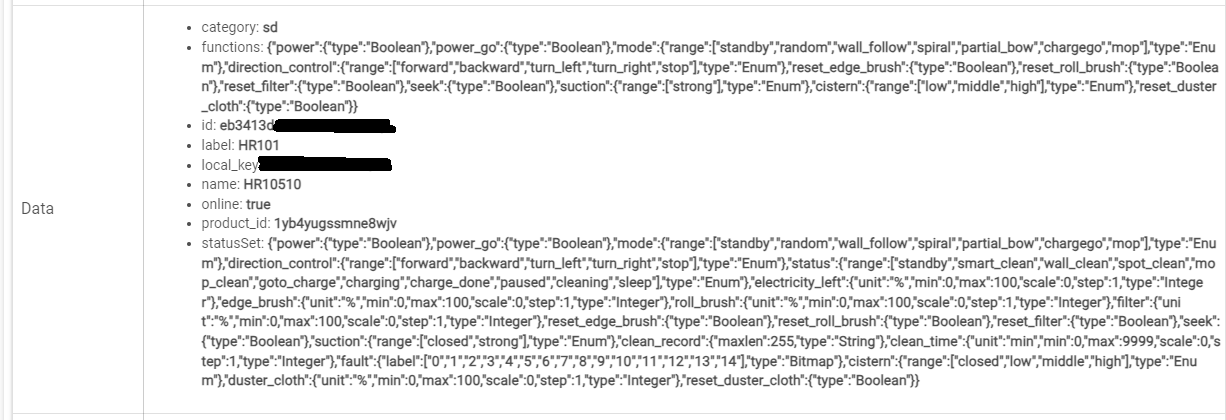
Unfortunately many "Off-Brand" models that work through Tuya are not recognized by Alexa or Google Home. Otherwise I would say "to hell" with integration. The Tuya cloud integration works, but the developer in question only augmented the driver set for his personal use, so there are no child device drivers available the bots. The heavy lifting of integration is already there and I can see the device functions, but no dice on a supporting driver. Instead a "Generic Component Switch" is assigned which does virtually nothing to control it. See below.
I decided recently just to start playing w/ HA and the 1st thing I found was instant Tuya/SmartLife integration. It found my bot instantly. I tried the bridge approach and one problem, no device driver(s) for Robot Vacs in HE, so they're not supported. As before, HE needs some kind of generic bot driver that can be hooked into by cloud APIs or bridging apps.
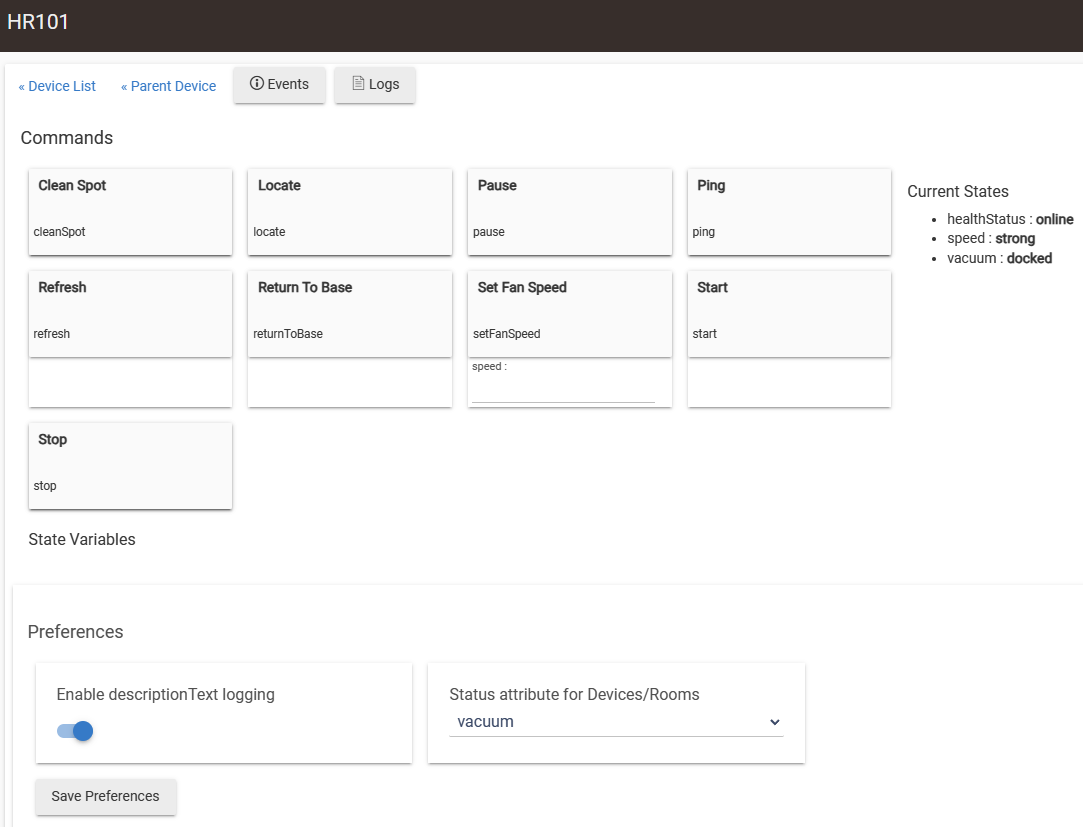
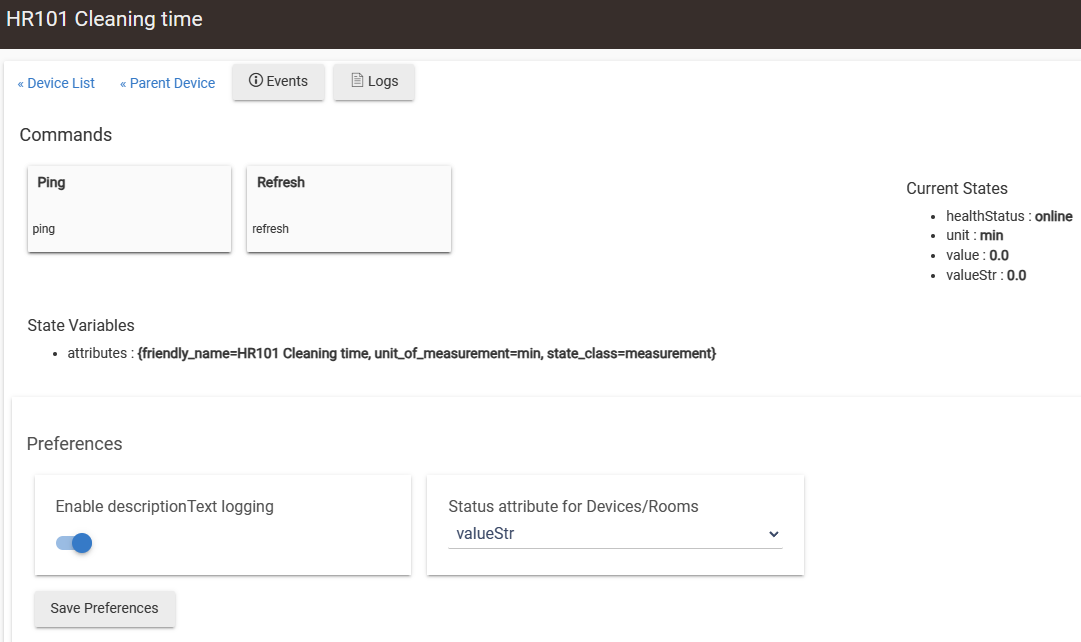
Since HE doesn't seem to have a driver for vacuum robots, what about a dashboard template for a set of commands to control one. I found that using the HA bridge driver, HE can now control probably most vacuum robots now. The only problem at this point is needing to create extra virtual devices (buttons mostly) to actuate control commands. The device already populates it's own controls. I was thinking of a template similar to a fan device where you can get a down menu of options to control it. Any takers?
Here's what HA has populated for controls for my own device: