The "cannot pop()" error is due to simultaneous instances of the app running. This usually is a sign of it being over triggered. You need to turn on logging, and demonstrate a failure in the logs. Without logs, there is no way to know what is going on.
Ironically those 2 cases do not have the pop issue - and I have checked with logging on and they are not being over triggered.. the stop repeating actions just doesn't seem to stop it repeating, but exit rule seems to work
The pop issue is separate and affects only one rule
logs needed to see what is going on.
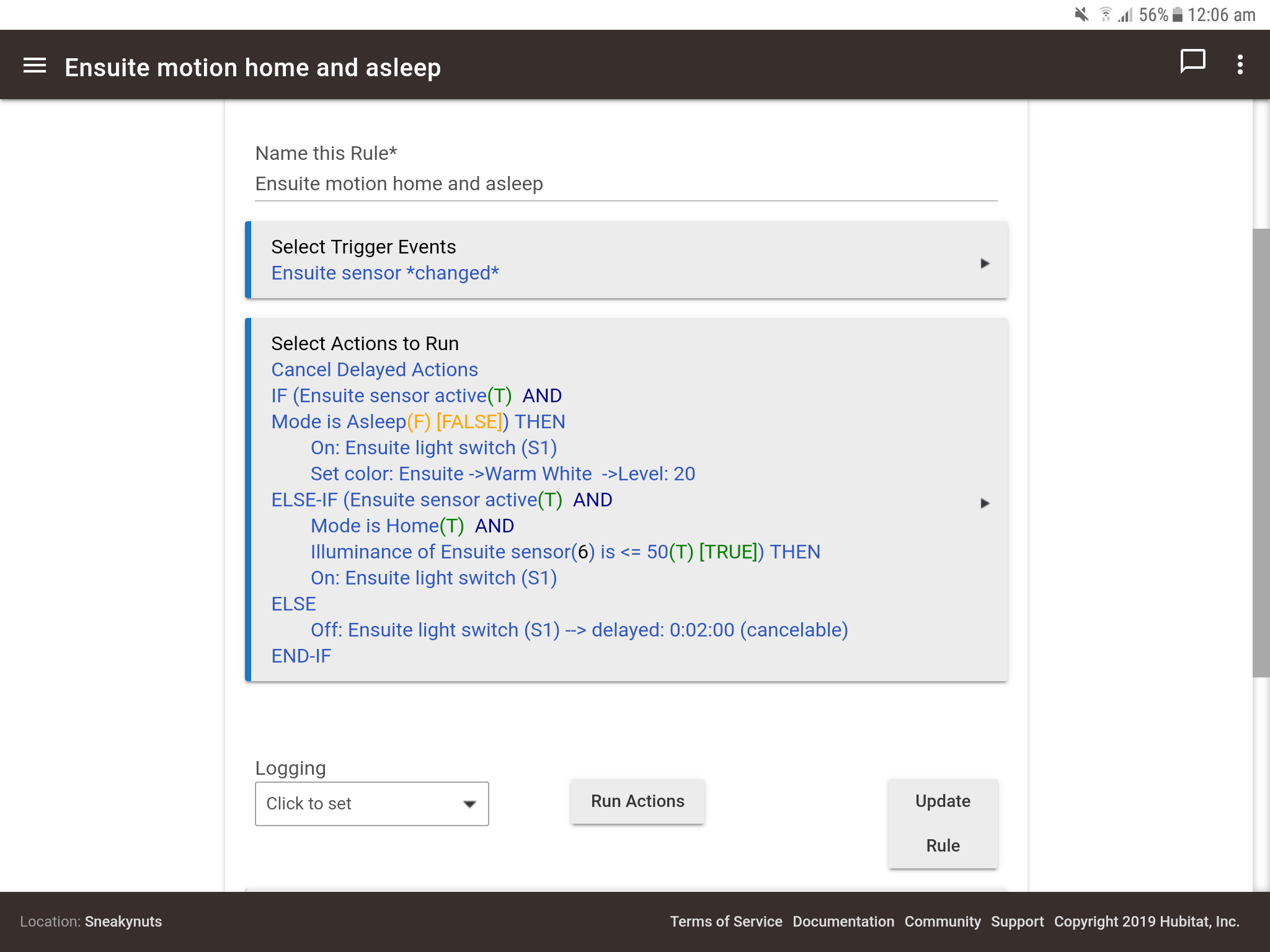
This is my 1st attempt at RM and wanted to know if this looks right?
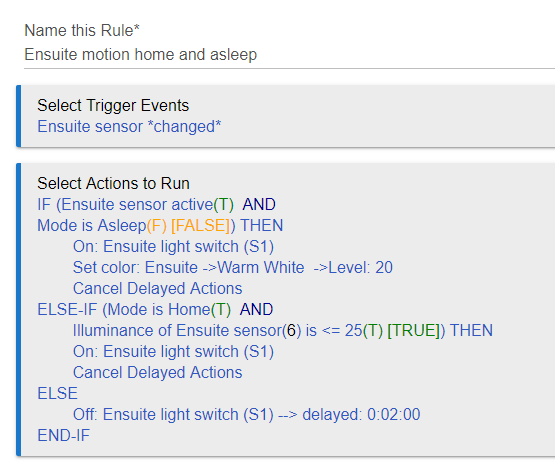
Just not sure if i have the cancel delayed actions correct and delayed timer part correct?
Cheers
id put it at the beginning and once, (before the 1st IF)
also the delay need to be cancelable (toggle in the action)
only other thing (might need to test) i didnt think (mode asleep) you would need the on command, the set color and level might turn it on by default
1 Like
The ELSE-IF will run when the Ensuite sensor is either active or inactive and the other two conditions are met.
Thanks.
Will make the changes
Include the active in the ELSE-IF conditions. You'll three conditions that need to be met for it to run.
1 Like
only 2 minor obs
do you need AND mode home in the else if (missing out other modes)
why 2 minutes, once its closed 30 seconds?
I guess i dont need AND mode is home - still learning. But now i think about it, makes sense that i dont need it
Once its closed 30 sec? What do you mean?
you have a 2 minute delay on closing, once its closed do you not want it to turn off straight away or are you inside when its closed (and only give yourself 2 minutes to do you business in there??)
edit scrub that - for some reason i thought you were using a contact senstor
Ah ok. Yeah, no contact sensor. Just motion detection.
Thanks for your help..
Is there a way to get to the commands in a device and control it with Rule Machine? Say I want to ping a device or turn off a bridge or restart a bridge etc? Thanks
Yes, you can simply use the “Custom Action” to display all of the commands in a device, even custom commands.
@ogiewon I'm not finding the Custom Action? I did find run custom action but it dosen't bring up my devices? How do I find it in RM I must be missing it? Thanks for your help.
“Run Custom Action” is the correct choice. Then select a Capability your your devices definitely already have (most have Actuator as a default capability, YMMV). Once you have the list of devices, select one. You will then be able to select from a drop down list of Commands for that device.
If you are looking for custom commands for the Telnet WyseSense bridge, let me know where you found it. I never could. That's why I went with Node Red option we have been discussing in other thread.
There is a trivial fix for that... just add ‘Capability “Actuator”’ to the custom Wyzesense driver as shown below. This will have no impact on the driver whatsoever.
metadata {
definition (name: "Wyze Telnet Link", namespace: "kk", author: "Kelly Koehn") {
capability "Telnet"
capability "Actuator"
attribute "TelnetSession", "string"
attribute "WyzeHubUSB", "string"
attribute "WyzeHubMAC", "string"
attribute "WyzeHubVer", "string"
command "disconnectTelnet"
command "connectTelnet"
command "startBridge"
}
}
Then, in RM select “Run Custom Action” and select “Actuator” as the capability. The Wyzsense device should then show up for you to choose.
1 Like

