One question, where do I delete the secondary children? I'm trying to find it but I can't find it.
There are buttons Children Create and Children Remove in the parent device.
If you see a button called test that will also toggle useChildDevices
First of all. Fantastic drivers. So easy to flash the stick Tasmota sensors onto an esp8266. Then this makes it so easy to implement them into hubitat. Fills a few voids in the hubduino drivers, which is also fantastic but I feel a combo of both works well for me.
I have noticed if I have a relay then the status updates quickly.
However for a multi sensor (in my case an sr04 ultrasonic distance device) I seem to have to click refresh for the value to change in hubitat. Is this normal? I have injected rule3.
Edit: Sorry it seems to update without refresh, just it's not very frequent. I guess to reduce traffic
Hi,
I love this project! Are there any plans to make the sensor data compatible with HomeKit? My use case is that I have set up an Ikea VINDRIKTNING with Weemos D1 Mini running Tasmota.
While Hubitat is able to receive the data and display the ppm, the sensor does not show up as HomeKit compatible. I'm also planning on setting up additional sensors, and would like to see their status in my HomeKit
So I am currently at moving a servo motor over to tasmota sync and it seems this should work.
However I am also monitoring an sr04 ultrasonic sensor. So I have created a device as a multi sensor and that recieved the distance measurement. Then I created a separate device as a dimmer switch and that seems to control the pwm of the device.
I have only injected the rule on the sensor device in hubitat. I believe if I inject the rule from the other pwm device then that will over overwrite the other rule3? Although probably doesn't matter.
Is this the only way to incorporate both the sensor and the pwm control? I can't seem to see its possible as one device. Two devices is fine, just means my dog Feeder esp8266 will be multiple devices that's all.
So my distance measurement from the sr04 sensor on tasmota doesn't update unless I click refresh on the device page.
Any ideas why?
It's setup as a multi sensor.
I have cleared attributes, then evaluate sensor data. It shows the response of the sensor. I then click inject rule. Tasmota console shows rule 3 is On. I then choose 60s for teleperiod on device page.
However no updates of the data. Only updates when I click refresh.
Edit: IP addresses are right. Well otherwise even refresh wouldn't work I guess.
I'm leaning towards some problem with the injection of rule? I do have the same tasmota device setup as two devices in hubitat as I couldn't work out how to have the servo and the distance sensor on the same device type in hubitat. Could that be the problem?
Hi All,
Firstly, thanks for the work gone into this, this looks like great progress in getting sonoff <> HE integration back on track after its bumpy road to date!
So I'm posting here hoping you guys can help, as I just installed these drivers with a couple of modified Sonoff Dual R2s (dry contact mod, Tasmota Release, 12.5.0) and I've hit a bit of a wall. I dug these R2s out my toybox as I decided it would be great to hack my new Frigidaire extractor hood and integrate it with HE. The crux is that I'm having a hard time capturing all the events I need to make the logic work.
To be able to maintain local control (happy wife) I needed to configure the GPIO buttons (as well as their effect on the relays) acting as momentary switches. The relays are wired in parallel with the existing tactile buttons on the Frigidaire PCB, and I fabricated a new PCB which sits in its place with its tactile buttons linked to GPIO 0 and 9 on my R2s. I'm simply trying to simulate a passthrough push with event capture and pulse output control on top via HE.
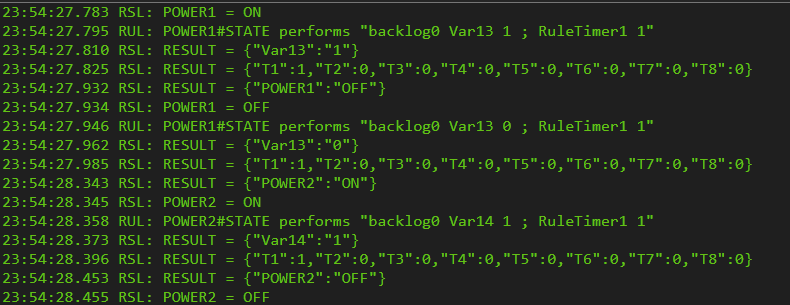
Now, if I quickly press and any of the GPIO connected buttons, I can see the On and Off entries appear in the Tasmota console of the respective devices, even though they blipped for just milliseconds; but in the event log of my devices in HE I cannot see any state change:
If I press and hold any GPIO button, maintaining the state of the relay as on for several seconds, then I get an entry in HE.
I was hoping that I can get that momentary state change in HE (albeit with a delay), however it doesn't appear to work this way, and it seems to only send the current state at the time of the next refresh as if it were being polled.
@garyjmilne Any guidance would be very much appreciated.
Jon
Hey Jon, I just left on vacation and will lose cell service quite soon (a cruise) but id be happy to consider your question in a week when i get back to regular internet access.
1 Like
Still hanging on with one bar. Assiming youve done tasmotaInjectRule then rule 3 contains the answer. Rule 3 gets triggered by a change and sends data tu Hubitat. You could modify it with another trigger or write a seperate rule.
Assiming its installed a a single switch then that is the only change that will trigger the sending of data to Hubitat.
Thanks for replying man! Yes I did the tasmotaInjectRule. I have tried setting it up as both a dual relay plug and also multisensor dual relay (with GPIO 0 set to Switch 3, and 9 Switch 4) wondering if the switch change info would get sent as part of the sensor change info, but I got the same result.

Any thoughts on this @garyjmilne
Could it be because of the following?
Hi Peterbrown77.pb
I have a tasmota device which measures the distance from the ceiling of my garage to the floor to check if my car is in the garage, it also uses the sr04 sensor. Mine updates according to the tele period I set which was 30 seconds, have you setup the tele period. If not set this to what you want to and then click tasmota tele period button, I then also do a tasmota inject after that.
1 Like
Yes I have. Sorry for terms missing below as I'm away from my device.
I reset the device (can't recall the button name, top left one in device page). Checked the sensor values worked (can't remember the button name but its the status 8 one). Then injected rule... Then set the teleperiod to 60.
My other tasmota device updates, so I'm really wondering if splitting that tasmota device into two in hubitat to allow for the device types it could be the problem? I only injected the rule from the multisensor device. Left the dimmer (servo) without injecting rule.
That last paragraph was a question as I don't really know.
1 Like
If you have two devices setup on Hubitat with the same IP then that will not work. All responses will go to one, whichever one has the accurate DNI as it wont allow duplicates.
1 Like
@jon.gillibrand Is this a correct problem statement.
When a user presses either of two momentary switches on other gpios it should cause the state of switch 1 to flip? That change in switch1 is the sent to HE.
Edit. I re read your reply. Goes in order of dni..
I only need one device to be refreshed which is the sensor one as the dimmer/servo only needs control. I think changing Dni will mess with the device? I can't recall if it's editable. Or can I just remove the device I don't need to refresh, and add it again so the dni is larger?
The DNI is editable but really shouldnt be edited unless you understand the implications. The dni is a hex encoding of the ip address and is assigned automatically when you save.
If it is not correct the device will not work correctly.
1 Like
I assuming my two devices with same IP have different dni so potentially there's other identifiable info in there as well? In this case could I switch the two dni for the single tasmota device (different hubitat devices)?
Edit: Or could I try removing the dimmer and re adding as it will be given a new dni and it may then not receive the response first?
I believe a refresh on device page is fairly reliable, so I could set it a scheduled refresh in rule machine if I can't change the device that gets the response easily.
Edit2: There's no easy way to have a dimmer, a sensor and single relay as a single device is there?
Hi @garyjmilne, thanks for following up.
I would tweak it slightly to read:
When a user presses either of two momentary switches on other gpios, it should cause the state of switch 1 or 2 (respectively) to flip. The change in state of either switch actioned (albeit momentarily) should reflect in the parent device's event log in HE, allowing for triggers to be subscribed to the SwitchX=ON event in a WebCORE piston.
OK. Then this is how i would approach it.
Install it as a dual switch. Verify that changing switch 1 or 2 on Tasmota is communicating correctly with HE via the driver and vice versa.
I would leave HE ignorant of the other gpios.
Connect the other gpios to two other switches, say 3 and 4.
Lastly you need a rule that says when switch 3 changes state then trigger a change in state for switch 1.
Im doing this on a phone so i cant give you the exact commands but that should work.

