I needed to get an average over time of a sensor value, and was having trouble figuring out how to do it. So I ended up making an app to do it for me! Unlike other apps that average values of two or more devices, I wanted something that tracks the value over time and reports the average value.
Setting up
This uses two hub variables: a string to contain a list of recorded values, and a number/decimal to save the average value to (number probably makes more sense when you're averaging something that's on a scale of 0-100). These must be created prior to creating a Running Average instance.
How to use
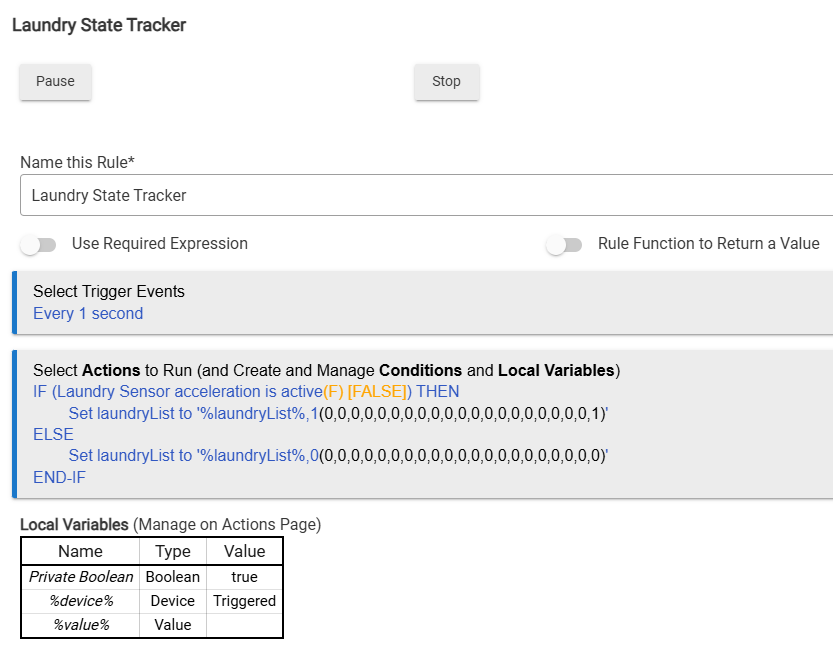
First, set up a periodic rule in Rule Machine, at the desired interval. You can either have it append your numeric sensor value directly to a list variable, or—as shown below—if the sensor has different states, record them as numeric values (like here, my acceleration sensor is either "active" or "inactive"):
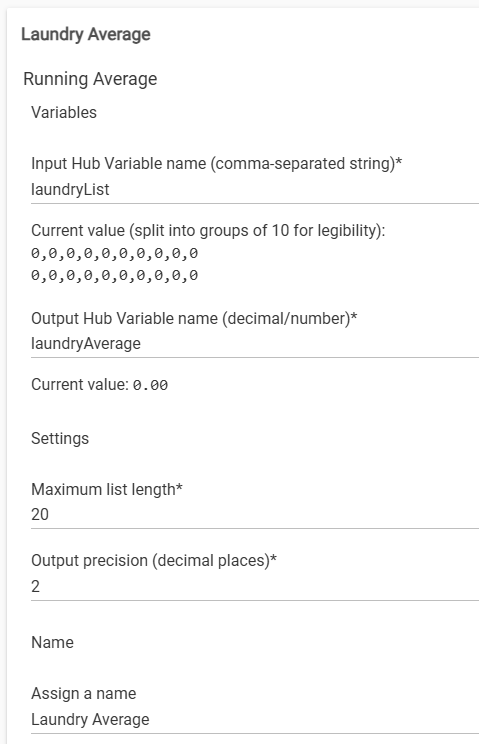
Create a new instance of Running Average; specify your input variable name (the list variable your rule saves to), and then an output variable to save the average to. You can also specify a maximum list length: this, times your interval in your Rule Machine rule, dictates how long the average is taken of (e.g. 3 seconds × maximum length 40 = 120 second running average).
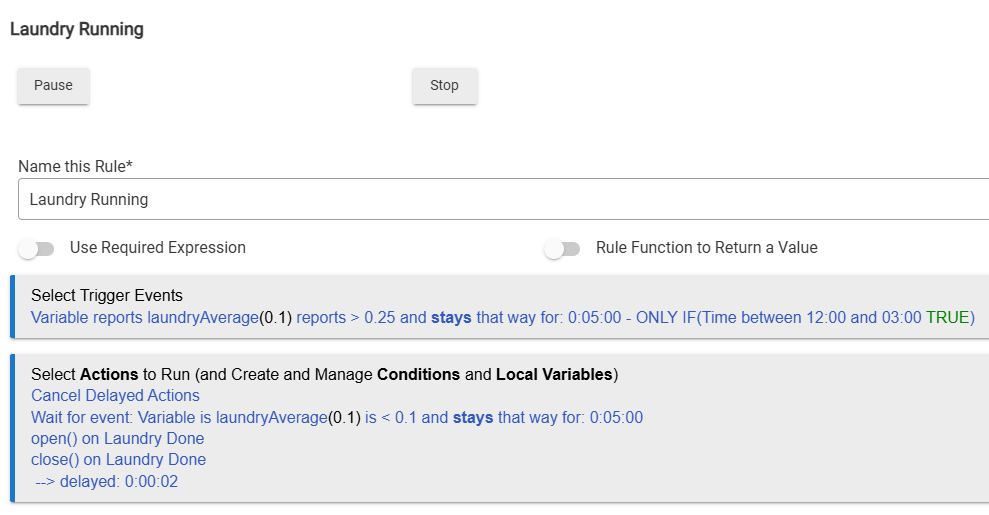
To use it, just make another rule based on the output variable, like so:
Tip: The ideal process is probably:
- Create your list variable and output variable
- Create your Running Average instance
- Create the rule that builds the list
- Create any rule(s) to that are based on the average
Running Average keeps the list truncated to the specified number of values, which is why I recommend creating the Running Average instance before creating the rule that builds the list (especially if it runs on a short interval).
It's simple, it's probably a bit silly and inefficient, but it accomplishes what I need. Hopefully someone else finds it useful, or finds some other creative use for it!
It's on GitHub, and also published in HPM:
