Never mind!
I had changed the wrong lines in the code, reversing the 0 and 100.
Everything is perfect now.
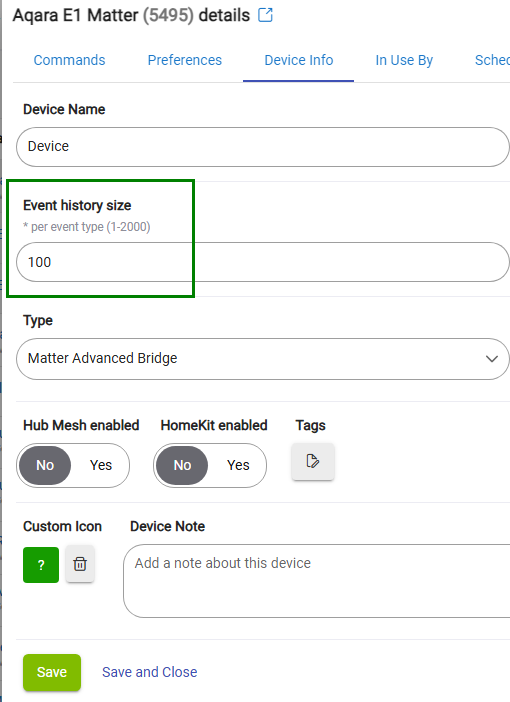
Change 34 and 35 to this @Field static final Integer OPEN = 100 // this is the standard! Hubitat is inverted? @Field static final Integer CLOSED = 0 // this is the standard! Hubitat is inverted?
Interesting note.
As I'm on the beta I find that when I do an update I sometimes lose the Matter bridge device.
A shutdown, unplug and power up gets it back.
This just happened again going to 2.4.1.103.
Do you think this a beta issue or a 'me' issue.
I assume you have no problems or there would have been a post.
@kkossev,
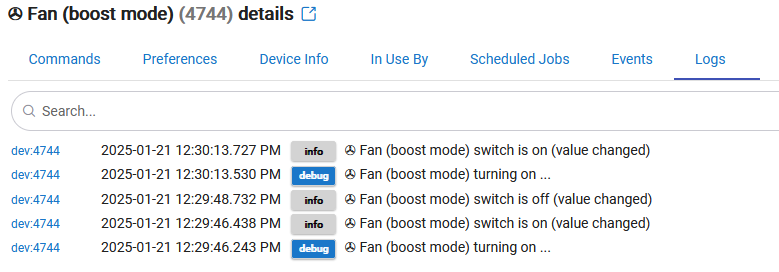
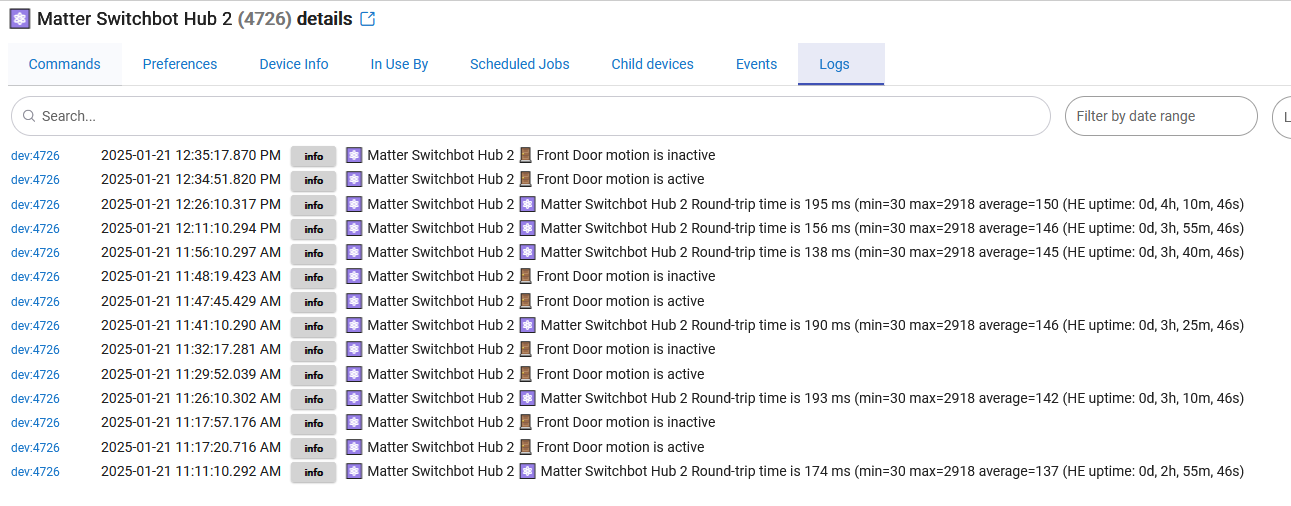
With the Switchbot Hub 2 bridge, I've noticed that sometimes the the Switchbot Bot does not turn on with first on command; in this scenario it will turn on after a second attempt (see logs for Fan (boost mode) below) or if the Switchbot Hub 2 is pinged first then On command is sent, is this normal or can it be improved? Thanks
I've had the same issue with my blind tilts. My quick solution was to put in a wait action of 15 seconds and send the open/close command again. If the first command works then nothing happens for the second command. Just a bit of redundancy I figured.
I have a newly setup Ikea Dirigera Hub using the Matter Advance Bridge Driver here. I just added an Aqara Temp/Humidity Sensor to the Dirigera hub and have discovered here in Hubitat. It came over as 2 sensors, 1 for Temperature, and 1 for Humidity.
Do I, or can I change the Hubitat Type to a Temperature/humidity sensor or leave it as it is when discovered as a Generic Component Omni Sensor.
I know I can add the Aqara directly to Hubitat which I have several of. I am wanting to see how the Dirigera Hub handles the sensor and to see any difference in battery life.
I was a little confused when I first set up the SwitchBot Hub 2.
I had 2 devices and thought that was my 2 blinds I had.
Turned out it was the 2 internal devices.
Leave them as Component Omni and add your other devices
What is annoying with the Matter implementation of the blind tilt is that you have to choose between "close up" or "close down" in the app Matter setup. If you want to change from one way to the other, you have to go back in the app and change the setup.
I don't think anything could be done in the driver to fix that annoyance. I might go with a bluetooth proxy setup instead of Matter for those.
I don't know how easy it is with webcore to select direction but with Matter it is impossible. You have to go into the app and change the setup.
As for it being built-in, in the app the control goes from close up to open to close down in one single slider.
As well, the HA bluetooth integration is using this range from 0 = close down, 50 = fully open, to 100 = close up.
Anyway, the problem arise from the fact that covers are deemed to have only one way to close. As such the bridge has no way to distinguish between these possibilities.
When doing your calibration of your blind tilt, set the control down direction in the calibration whichever direction you want then to always close. So basically whichever direction you want them to close make that the first direction in your calibration. It doesn't have to really be the down direction. Just ignore the designation of up or down and think about the direction you want. Then when HE initiates the command to close they will close in the down direction (the first direction you set in calibration) regardless if the actual is up or down.
That way you don't have to physically change anything in the app.
I'm not sure I understand your instructions but I think you are suggesting to trick the calibration to get "close up" as "fully open" and "close down" as closed. Making it behave like the HA integration. (0% = close up, 50% = fully open, 100% = close down).
Sort of. I am basically saying trick calibration to where closed down is whatever direction you want it to be. Up or down you can make closed down. And honestly now that you say that the calibration just reads gear location in the motor so yes you could probably make either one be whatever you want.
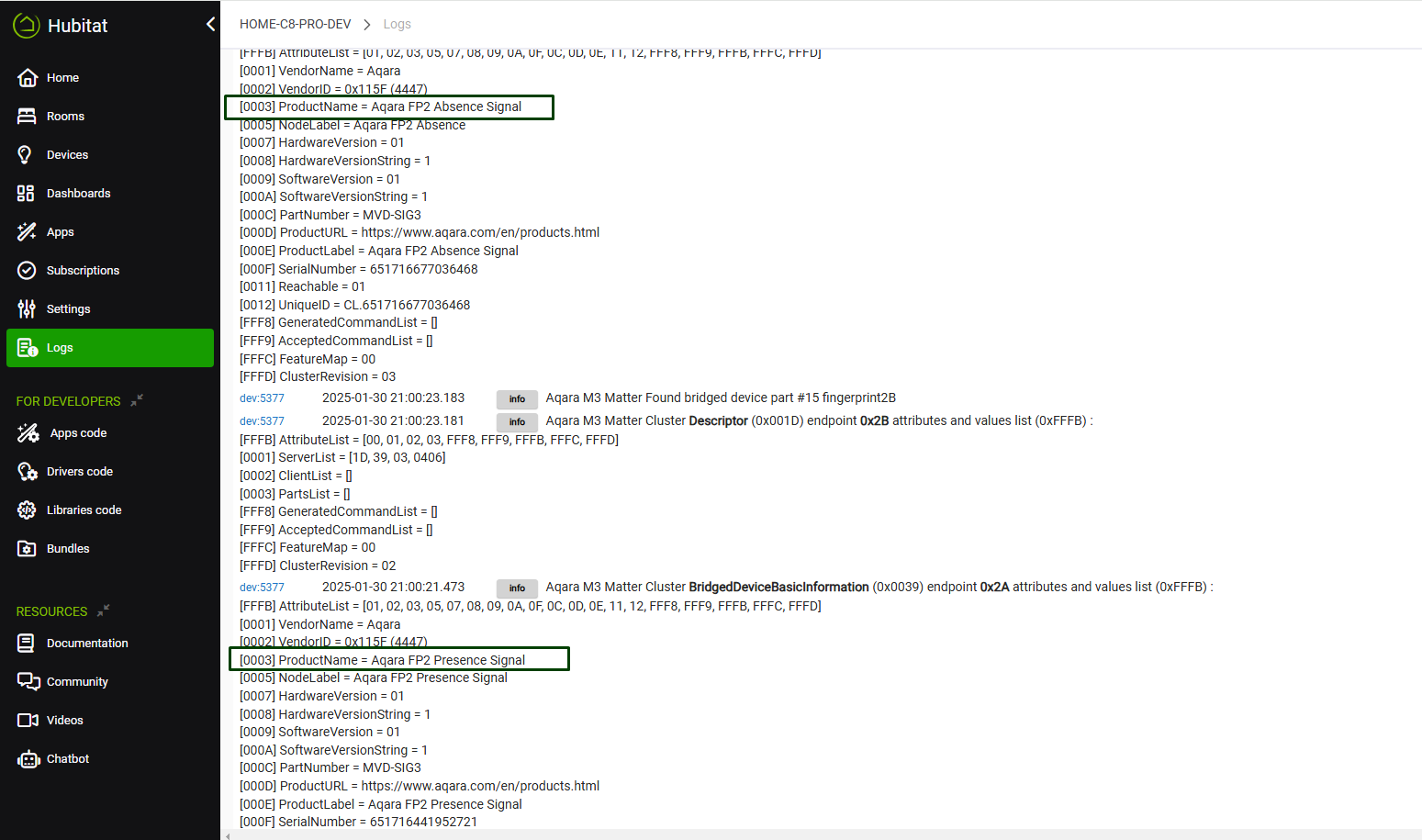
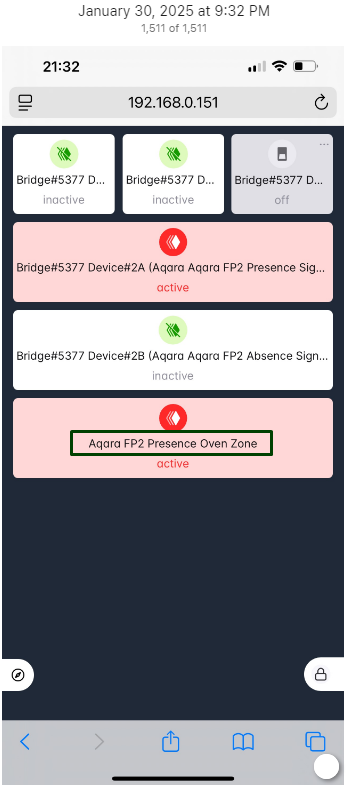
Unfortunately, there is a cloud dependency somewhere in Aqara M3 hub or in the FP2 sensor.
I have a problem with my router WAN Internet access at the moment, and the FP2 presence sensor is not working anymore. At the same time, I can still control the Aqara Ceiling light T1 from Hubitat, i.e. the local Matter connection between the Aqara M3 and HE is working offline for some Aqara devices, but not working for some others…