I am using a code that was adopted from SmartThings DHT. Don't remember if I converted it, I can't find it in GitHub repository at the moment.
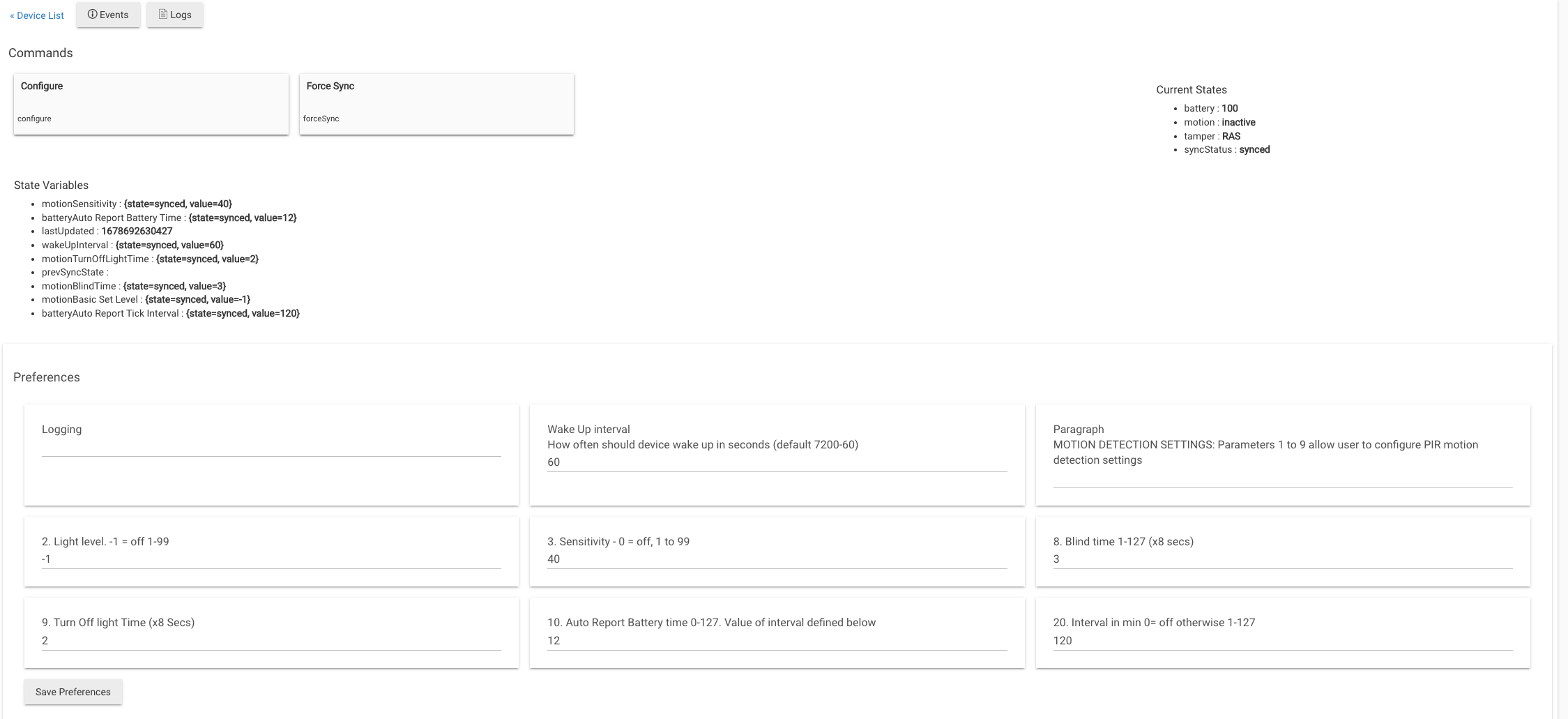
The motion detection (active/inactive) works just fine, but the battery level stays 100% since a long time, that is most probably wrong.
Philio PSP05 driver cide
/**
* Fibaro Motion Sensor ZW5
*
* Copyright 2017 Olivier Rousseau (Based on Arthur Draga's Fibaro ZW5 DTH)
*
* Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except
* in compliance with the License. You may obtain a copy of the License at:
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software distributed under the License is distributed
* on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License
* for the specific language governing permissions and limitations under the License.
*
*/
metadata {
definition (name: "Philio PSP05", namespace: "Nepomucene", author: "Olivier Rousseau") {
capability "Battery"
capability "Configuration"
capability "Motion Sensor"
capability "Tamper Alert"
command "forceSync"
fingerprint deviceId: "0x0701", inClusters: "0x5E, 0x20, 0x86, 0x72, 0x5A, 0x59, 0x85, 0x73, 0x84, 0x80, 0x71, 0x56, 0x70, 0x31, 0x8E, 0x22, 0x30, 0x9C, 0x98, 0x7A", outClusters: ""
fingerprint deviceId: "0x0701", inClusters: "0x5E, 0x20, 0x86, 0x72, 0x5A, 0x59, 0x85, 0x73, 0x84, 0x80, 0x71, 0x56, 0x70, 0x31, 0x8E, 0x22, 0x30, 0x9C, 0x7A", outClusters: ""
fingerprint mfr: "019B", deviceId: "0x0806", prod: "0003", model: "0202", inClusters: "0x5E, 0x43, 0x31, 0x86, 0x40, 0x59, 0x85, 0x73, 0x72, 0x5A, 0x70"
}
tiles(scale: 2) {
multiAttributeTile(name:"FGMS", type:"lighting", width:6, height:4) {
tileAttribute("device.motion", key:"PRIMARY_CONTROL") {
attributeState("inactive", label:"no motion", icon:"st.motion.motion.inactive", backgroundColor:"#ffffff")
attributeState("active", label:"motion", icon:"st.motion.motion.active", backgroundColor:"#00a0dc")
}
tileAttribute("device.lastEvent", key:"SECONDARY_CONTROL") {
attributeState("val", label:'${currentValue}')
}
}
valueTile("tamper", "device.tamper", inactiveLabel: false, width: 2, height: 2, decoration: "flat") {
state "val", label:'Tamper:\n${currentValue}'
}
valueTile("battery", "device.battery", inactiveLabel: false, width: 2, height: 2, decoration: "flat") {
state "battery", label:'${currentValue}%\nbattery', unit:"%"
}
standardTile("syncStatus", "device.syncStatus", decoration: "flat", width: 2, height: 2) {
state "synced", label:'OK', action:"forceSync", backgroundColor: "#00a0dc", icon: "https://raw.githubusercontent.com/ClassicGOD/SmartThingsPublic/master/devicetypes/classicgod/fibaro-motion-sensor-zw5.src/images/sync_icon.png"
state "pending", label:"Pending", action:"forceSync", backgroundColor: "#153591", icon: "https://raw.githubusercontent.com/ClassicGOD/SmartThingsPublic/master/devicetypes/classicgod/fibaro-motion-sensor-zw5.src/images/sync_icon.png"
state "inProgress", label:"Syncing", action:"forceSync", backgroundColor: "#44b621", icon: "https://raw.githubusercontent.com/ClassicGOD/SmartThingsPublic/master/devicetypes/classicgod/fibaro-motion-sensor-zw5.src/images/sync_icon.png"
state "incomplete", label:"Incomplete", action:"forceSync", backgroundColor: "#f1d801", icon: "https://raw.githubusercontent.com/ClassicGOD/SmartThingsPublic/master/devicetypes/classicgod/fibaro-motion-sensor-zw5.src/images/sync_icon.png"
state "failed", label:"Failed", action:"forceSync", backgroundColor: "#bc2323", icon: "https://raw.githubusercontent.com/ClassicGOD/SmartThingsPublic/master/devicetypes/classicgod/fibaro-motion-sensor-zw5.src/images/sync_icon.png"
state "force", label:"Force", action:"forceSync", backgroundColor: "#e86d13", icon: "https://raw.githubusercontent.com/ClassicGOD/SmartThingsPublic/master/devicetypes/classicgod/fibaro-motion-sensor-zw5.src/images/sync_icon.png"
}
main "FGMS"
details(["FGMS","tamper","battery", "syncStatus"])
}
preferences {
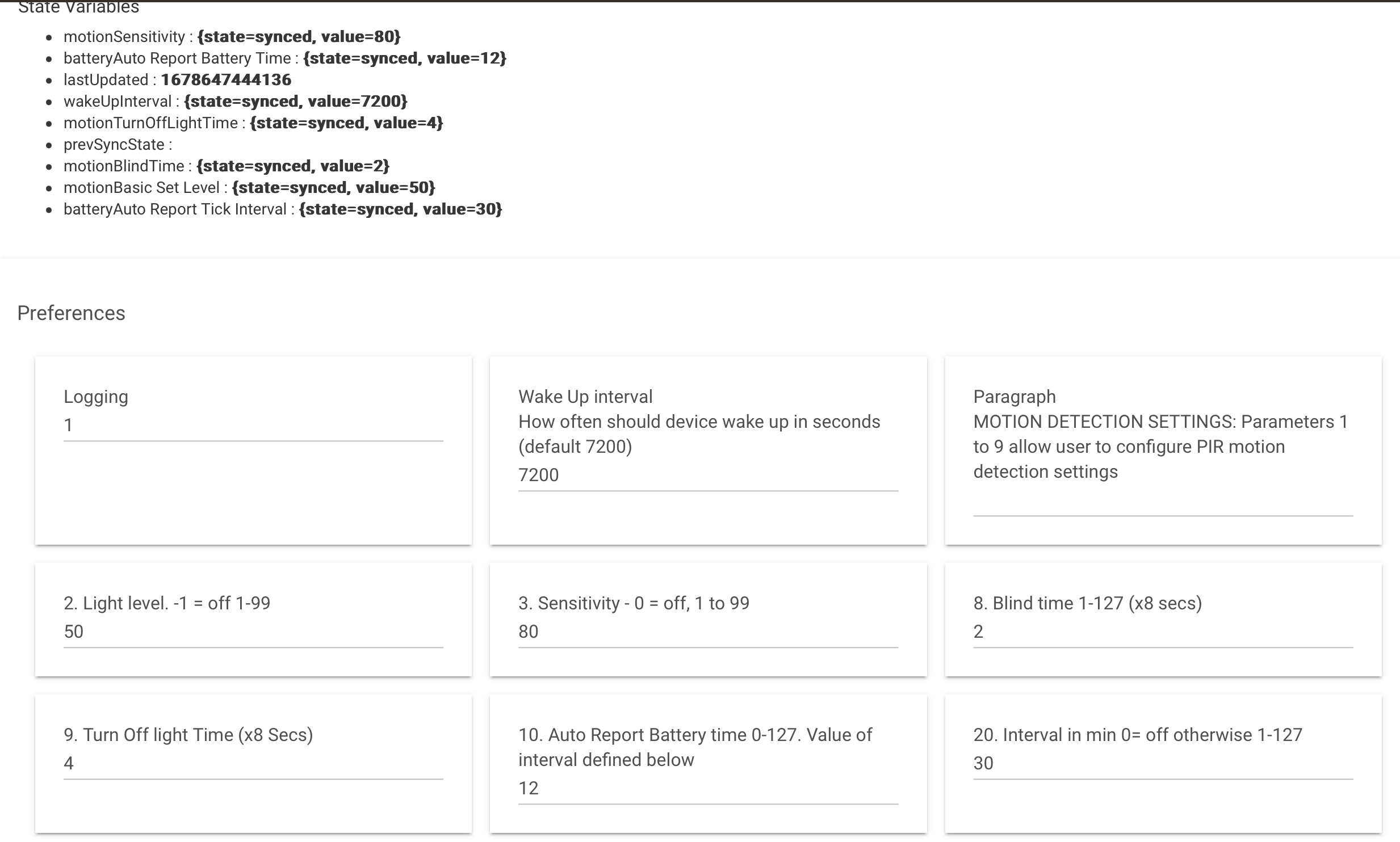
input ( name: "logging", title: "Logging", type: "boolean", required: false )
input ( name: "wakeUpInterval", title: "Wake Up interval", description: "How often should device wake up in seconds (default 7200)", type: "number", range: "1..65535", defaultValue: 7200, required: false )
input ( type: "paragraph", element: "paragraph", title: null, description: "MOTION DETECTION SETTINGS:\nParameters 1 to 9 allow user to configure PIR motion detection settings" )
getPrefsFor("motion")
getPrefsFor("battery")
}
}
// UI - supporting functions
private getPrefsFor(String name) {
parameterMap().findAll( {it.key.contains(name)} ).each {
input (
name: it.key,
title: "${it.num}. ${it.title}",
description: it.descr,
type: it.type,
options: it.options,
range: (it.min != null && it.max != null) ? "${it.min}..${it.max}" : null,
defaultValue: it.def,
required: false
)
}
}
def forceSync() {
logging("${device.displayName} - Executing forceSync()", "info")
if (device.currentValue("syncStatus") != "force") {
state.prevSyncState = device.currentValue("syncStatus")
sendEvent(name: "syncStatus", value: "force")
} else {
if (state.prevSyncState != null) {
sendEvent(name: "syncStatus", value: state.prevSyncState)
} else {
sendEvent(name: "syncStatus", value: "synced")
}
}
}
// Event handlers and supporting functions
def zwaveEvent(hubitat.zwave.commands.notificationv3.NotificationReport cmd) {
logging("${device.displayName} - NotificationReport received for ${cmd.event}, parameter value: ${cmd.eventParameter[0]}", "info")
def lastTime = new Date().format("yyyy MMM dd EEE HH:mm:ss", location.timeZone)
if (cmd.notificationType == 7) {
if (cmd.event == 0) {
sendEvent(name: "cmd.event: ", value: cmd.event)
sendEvent(name: (cmd.eventParameter[0] == 3) ? "tamper" : "motion", value: (cmd.eventParameter[0] == 3) ? "clear" :"inactive")
}
else if (cmd.event == 3) {
sendEvent(name: "tamper", value: "detected")
sendEvent(name: "lastEvent", value: "Tamper - $lastTime", displayed: false)
runIn(5, TamperOff)
}
else if (cmd.event == 8) {
sendEvent(name: "motion", value: "active")
sendEvent(name: "lastEvent", value: "Motion - $lastTime", displayed: false)
runIn(5, MotionOff)
}
}
}
def TamperOff () {sendEvent(name: "tamper", value: "RAS")}
def MotionOff() {sendEvent(name: "motion", value: "inactive")}
def zwaveEvent(hubitat.zwave.commands.batteryv1.BatteryReport cmd) {
logging("${device.displayName} - BatteryReport received, value: ${cmd.batteryLevel}", "info")
sendEvent(name: "battery", value: cmd.batteryLevel.toString(), unit: "%", displayed: true)
}
// Parameter configuration, synchronization and verification
def updated() {
logging("${device.displayName} - Executing updated()","info")
if ( state.lastUpdated && (now() - state.lastUpdated) < 500 ) return
def syncRequired = 0
parameterMap().each {
if(settings."$it.key" != null) {
if (state."$it.key" == null) { state."$it.key" = [value: null, state: "synced"] }
if (state."$it.key".value != settings."$it.key" as Integer) {
syncRequired = 1
state."$it.key".value = settings."$it.key" as Integer
state."$it.key".state = "notSynced"
}
}
}
if(settings.wakeUpInterval != null) {
if (state.wakeUpInterval == null) { state.wakeUpInterval = [value: null, state: "synced"] }
if (state.wakeUpInterval.value != settings.wakeUpInterval as Integer) {
syncRequired = 1
sendEvent(name: "checkInterval", value: (settings.wakeUpInterval as Integer) * 4 + 120, displayed: false, data: [protocol: "zwave", hubHardwareId: device.hub.hardwareID])
state.wakeUpInterval.value = settings.wakeUpInterval as Integer
state.wakeUpInterval.state = "notSynced"
}
}
if ( syncRequired !=0 ) { sendEvent(name: "syncStatus", value: "pending") }
state.lastUpdated = now()
}
def zwaveEvent(hubitat.zwave.commands.wakeupv2.WakeUpNotification cmd) {
logging("${device.displayName} woke up", "info")
def cmdsSet = []
def cmdsGet = []
def cmds = []
def Integer cmdCount = 0
def results = [createEvent(descriptionText: "$device.displayName woke up", isStateChange: true)]
cmdsGet << zwave.batteryV1.batteryGet()
if (device.currentValue("syncStatus") != "synced") {
parameterMap().each {
if (device.currentValue("syncStatus") == "force") { state."$it.key".state = "notSynced" }
if (state."$it.key".value != null && state."$it.key".state == "notSynced") {
cmdsSet << zwave.configurationV2.configurationSet(configurationValue: intToParam(state."$it.key".value, it.size), parameterNumber: it.num, size: it.size)
cmdsGet << zwave.configurationV2.configurationGet(parameterNumber: it.num)
cmdCount = cmdCount + 1
}
}
if (device.currentValue("syncStatus") == "force") { state.wakeUpInterval.state = "notSynced" }
if (state.wakeUpInterval.value != null && state.wakeUpInterval.state == "notSynced") {
cmdsSet << zwave.wakeUpV2.wakeUpIntervalSet(seconds: state.wakeUpInterval.value as Integer, nodeid: zwaveHubNodeId)
//cmdsGet << zwave.wakeUpV2.wakeUpIntervalGet() //not roking becaouse SmartThings... ;D
cmdCount = cmdCount + 1
}
logging("${device.displayName} - Not synced, syncing ${cmdCount} parameters", "info")
sendEvent(name: "syncStatus", value: "inProgress")
runIn((5+cmdCount*1.5).toInteger(), syncCheck)
}
if (cmdsSet) {
cmds = encapSequence(cmdsSet,500)
cmds << "delay 500"
}
cmds = cmds + encapSequence(cmdsGet,1000)
cmds << "delay "+(5000+cmdCount*1500)
cmds << encap(zwave.wakeUpV1.wakeUpNoMoreInformation())
results = results + response(cmds)
return results
}
def zwaveEvent(hubitat.zwave.commands.configurationv2.ConfigurationReport cmd) {
def paramKey = parameterMap().find( {it.num == cmd.parameterNumber } ).key
logging("${device.displayName} - Parameter ${paramKey} value is ${cmd.scaledConfigurationValue} expected " + state."$paramKey".value, "info")
if (state."$paramKey".value == cmd.scaledConfigurationValue) {
state."$paramKey".state = "synced"
}
}
def zwaveEvent(hubitat.zwave.commands.applicationstatusv1.ApplicationRejectedRequest cmd) {
logging("${device.displayName} - rejected request!","warn")
if (device.currentValue("syncStatus") == "inProgress") { sendEvent(name: "syncStatus", value:"failed") }
}
def zwaveEvent(hubitat.zwave.commands.wakeupv2.WakeUpIntervalReport cmd) {
log.debug "interval! " + cmd
}
def syncCheck() {
logging("${device.displayName} - Executing syncCheck()","info")
def Integer count = 0
state.wakeUpInterval.state = "synced"
if (device.currentValue("syncStatus") != "synced") {
parameterMap().each {
if (state."$it.key".state == "notSynced" ) {
count = count + 1
}
}
}
if (count == 0) {
logging("${device.displayName} - Sync Complete","info")
sendEvent(name: "syncStatus", value: "synced")
} else {
logging("${device.displayName} Sync Incomplete","info")
if (device.currentValue("syncStatus") != "failed") {
sendEvent(name: "syncStatus", value: "incomplete")
}
}
}
// Copied from Fibaro official code.
def zwaveEvent(hubitat.zwave.commands.manufacturerspecificv2.ManufacturerSpecificReport cmd) {
log.debug "manufacturerId: ${cmd.manufacturerId}"
log.debug "manufacturerName: ${cmd.manufacturerName}"
log.debug "productId: ${cmd.productId}"
log.debug "productTypeId: ${cmd.productTypeId}"
}
def zwaveEvent(hubitat.zwave.commands.manufacturerspecificv2.DeviceSpecificReport cmd) {
log.debug "deviceIdData: ${cmd.deviceIdData}"
log.debug "deviceIdDataFormat: ${cmd.deviceIdDataFormat}"
log.debug "deviceIdDataLengthIndicator: ${cmd.deviceIdDataLengthIndicator}"
log.debug "deviceIdType: ${cmd.deviceIdType}"
if (cmd.deviceIdType == 1 && cmd.deviceIdDataFormat == 1) {//serial number in binary format
String serialNumber = "h'"
cmd.deviceIdData.each{ data ->
serialNumber += "${String.format("%02X", data)}"
}
updateDataValue("serialNumber", serialNumber)
log.debug "${device.displayName} - serial number: ${serialNumber}"
}
}
def zwaveEvent(hubitat.zwave.commands.versionv1.VersionReport cmd) {
updateDataValue("version", "${cmd.applicationVersion}.${cmd.applicationSubVersion}")
log.debug "applicationVersion: ${cmd.applicationVersion}"
log.debug "applicationSubVersion: ${cmd.applicationSubVersion}"
log.debug "zWaveLibraryType: ${cmd.zWaveLibraryType}"
log.debug "zWaveProtocolVersion: ${cmd.zWaveProtocolVersion}"
log.debug "zWaveProtocolSubVersion: ${cmd.zWaveProtocolSubVersion}"
}
def zwaveEvent(hubitat.zwave.commands.deviceresetlocallyv1.DeviceResetLocallyNotification cmd) {
log.warn "${device.displayName} - received command: $cmd - device has reset itself"
}
def configure() {
log.debug "Executing 'configure'"
// Device-Watch simply pings if no device events received for 8 hrs & 2 minutes
sendEvent(name: "checkInterval", value: 8 * 60 * 60 + 2 * 60, displayed: false, data: [protocol: "zwave", hubHardwareId: device.hub.hardwareID])
def cmds = []
cmds += zwave.wakeUpV2.wakeUpIntervalSet(seconds: 7200, nodeid: zwaveHubNodeId)//FGMS' default wake up interval
cmds += zwave.manufacturerSpecificV2.manufacturerSpecificGet()
cmds += zwave.manufacturerSpecificV2.deviceSpecificGet()
cmds += zwave.versionV1.versionGet()
cmds += zwave.associationV2.associationSet(groupingIdentifier:1, nodeId:[zwaveHubNodeId])
cmds += zwave.batteryV1.batteryGet()
cmds += zwave.sensorMultilevelV5.sensorMultilevelGet(sensorType: 1, scale: 0)
cmds += zwave.sensorMultilevelV5.sensorMultilevelGet(sensorType: 3, scale: 1)
cmds += zwave.wakeUpV2.wakeUpNoMoreInformation()
encapSequence(cmds, 500)
}
/*
####################
## Z-Wave Toolkit ##
####################
*/
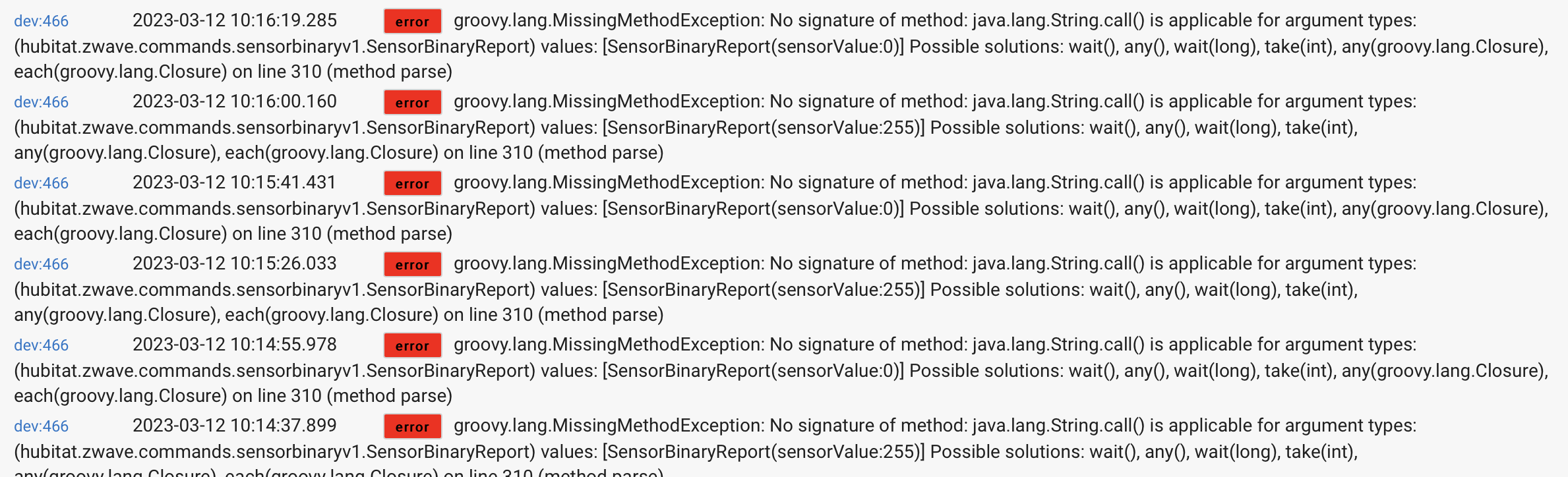
def parse(String description) {
def result = []
logging("${device.displayName} - Parsing: ${description}")
if (description.startsWith("Err 106")) {
result = createEvent(
descriptionText: "Failed to complete the network security key exchange. If you are unable to receive data from it, you must remove it from your network and add it again.",
eventType: "ALERT",
name: "secureInclusion",
value: "failed",
displayed: true
)
} else if (description == "updated") {
return null
} else {
def cmd = zwave.parse(description, cmdVersions())
if (cmd) {
logging("${device.displayName} - Parsed: ${cmd}")
zwaveEvent(cmd)
}
}
}
def zwaveEvent(hubitat.zwave.commands.securityv1.SecurityMessageEncapsulation cmd) {
def encapsulatedCommand = cmd.encapsulatedCommand(cmdVersions())
if (encapsulatedCommand) {
logging("${device.displayName} - Parsed SecurityMessageEncapsulation into: ${encapsulatedCommand}")
zwaveEvent(encapsulatedCommand)
} else {
log.warn "Unable to extract secure cmd from $cmd"
}
}
def zwaveEvent(hubitat.zwave.commands.crc16encapv1.Crc16Encap cmd) {
def version = cmdVersions()[cmd.commandClass as Integer]
def ccObj = version ? zwave.commandClass(cmd.commandClass, version) : zwave.commandClass(cmd.commandClass)
def encapsulatedCommand = ccObj?.command(cmd.command)?.parse(cmd.data)
if (encapsulatedCommand) {
logging("${device.displayName} - Parsed Crc16Encap into: ${encapsulatedCommand}")
zwaveEvent(encapsulatedCommand)
} else {
log.warn "Could not extract crc16 command from $cmd"
}
}
def zwaveEvent(hubitat.zwave.commands.multichannelv3.MultiChannelCmdEncap cmd) {
def encapsulatedCommand = cmd.encapsulatedCommand(cmdVersions())
if (encapsulatedCommand) {
logging("${device.displayName} - Parsed MultiChannelCmdEncap ${encapsulatedCommand}")
zwaveEvent(encapsulatedCommand, cmd.sourceEndPoint as Integer)
} else {
log.warn "Could not extract multi channel command from $cmd"
}
}
private logging(text, type = "debug") {
if (settings.logging == "true") {
log."$type" text
}
}
private secEncap(hubitat.zwave.Command cmd) {
logging("${device.displayName} - encapsulating command using Secure Encapsulation, command: $cmd","info")
zwave.securityV1.securityMessageEncapsulation().encapsulate(cmd).format()
}
private crcEncap(hubitat.zwave.Command cmd) {
logging("${device.displayName} - encapsulating command using CRC16 Encapsulation, command: $cmd","info")
zwave.crc16EncapV1.crc16Encap().encapsulate(cmd).format() // doesn't work righ now because SmartThings...
//"5601${cmd.format()}0000"
}
private encap(hubitat.zwave.Command cmd) {
// if (zwaveInfo.zw.contains("s") && zwaveInfo.sec.contains(Integer.toHexString(cmd.commandClassId).toUpperCase())) {
cmd.format()
/*
if (zwaveInfo.zw.contains("s") && zwaveInfo.sec.contains(Integer.toHexString(cmd.commandClassId).toUpperCase())) {
// if device is included securly and the command is on list of commands dupported with secure encapsulation
secEncap(cmd)
} else if (zwaveInfo.cc.contains("56")){
// if device supports crc16
crcEncap(cmd)
} else { // if all else fails send plain command
logging("${device.displayName} - no encapsulation supported for command: $cmd","info")
cmd.format()
}
*/
}
private encapSequence(cmds, delay=250) {
delayBetween(cmds.collect{ encap(it) }, delay)
}
private List intToParam(Long value, Integer size = 1) {
def result = []
size.times {
result = result.plus(0, (value & 0xFF) as Short)
value = (value >> 8)
}
return result
}
/*
##########################
## Device Configuration ##
##########################
*/
private Map cmdVersions() {
//[0x5E: 2, 0x59: 1, 0x80: 1, 0x56: 1, 0x7A: 3, 0x73: 1, 0x98: 1, 0x22: 1, 0x85: 2, 0x5B: 1, 0x70: 1, 0x8E: 2, 0x86: 2, 0x84: 2, 0x75: 2, 0x72: 2] //Fibaro KeyFob
[0x5E: 1, 0x86: 1, 0x72: 2, 0x59: 1, 0x80: 1, 0x73: 1, 0x56: 1, 0x22: 1, 0x31: 5, 0x98: 1, 0x7A: 3, 0x20: 1, 0x5A: 1, 0x85: 2, 0x84: 2, 0x71: 3, 0x8E: 1, 0x70: 2, 0x30: 1, 0x9C: 1] //Fibaro Motion Sensor ZW5
//[0x5E: 1, 0x86: 1, 0x72: 1, 0x59: 1, 0x73: 1, 0x22: 1, 0x56: 1, 0x32: 3, 0x71: 1, 0x98: 1, 0x7A: 1, 0x25: 1, 0x5A: 1, 0x85: 2, 0x70: 2, 0x8E: 1, 0x60: 3, 0x75: 1, 0x5B: 1] //Fibaro Double Switch 2 (FGS-223) & FIBARO Single Switch 2 (FGS-213)
}
private parameterMap() {[
[key: "motionBasic Set Level", num: 2, size: 1, type: "number", def: 50, min: -1, max: 99, title: "Light level. -1 = off 1-99", descr: null],
[key: "motionSensitivity", num: 3, size: 1, type: "number", def: 4, min: 0, max: 99, title: "Sensitivity - 0 = off, 1 to 99", descr: null],
[key: "motionBlindTime", num: 8, size: 1, type: "number", def: 3, min: 1, max: 127, title: "Blind time 1-127 (x8 secs)", descr: null],
[key: "motionTurnOffLightTime", num: 9, size: 1, type: "number", def: 4, title: "Turn Off light Time (x8 Secs)", descr: null],
[key: "batteryAuto Report Battery Time", num: 10, size: 1, type: "number", def: 12, title: "Auto Report Battery time 0-127. Value of interval defined below", descr: null],
[key: "batteryAuto Report Tick Interval", num: 20, size: 1, type: "number", def: 30, title: "Interval in min 0= off otherwise 1-127", descr: null],
]}