Correct
People get tired of my saying this, but READ THE ONLINE NODE HELP (caps for emphasis, not anger). It says exactly what are allowable inputs - there is no need to guess.
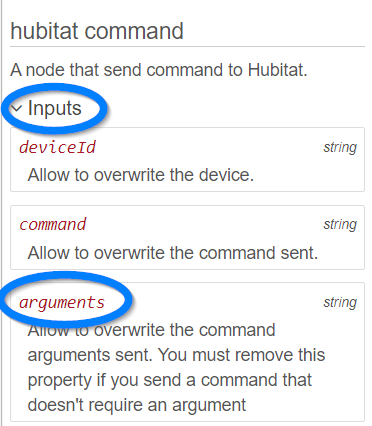
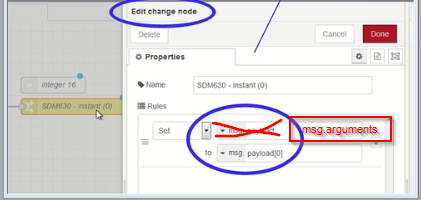
All that said, I just submitted an issue/request to consider renaming the input help to say "msg.arguments" instead of just "arguments" to remove ambiguity.

