Hi all,
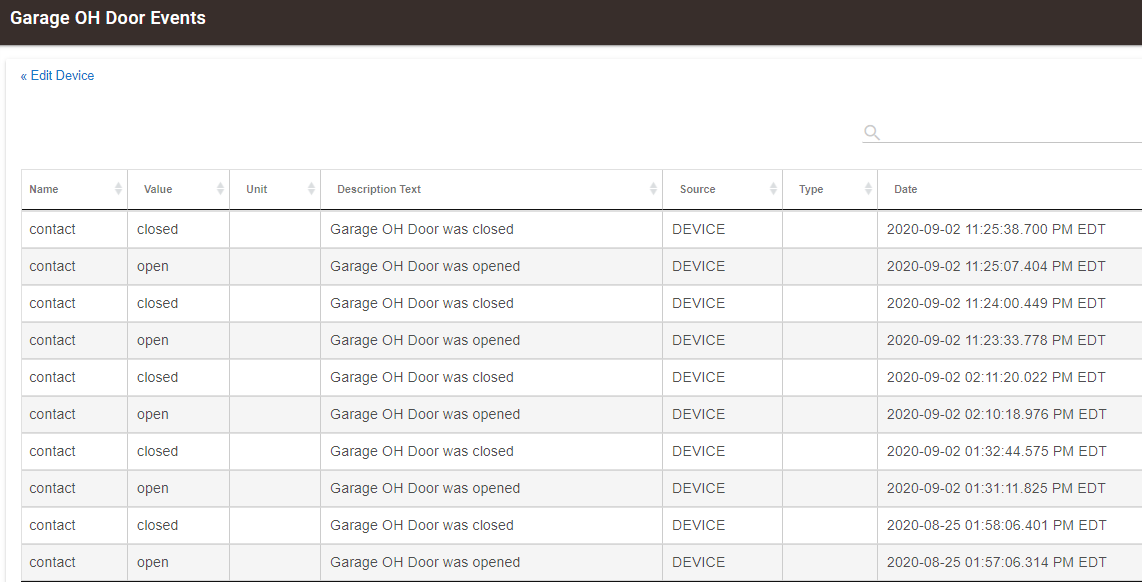
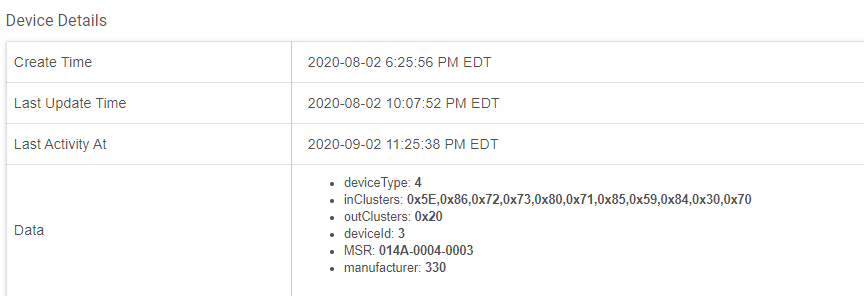
I excluded my Ecolink Tilt Sensor from my ST setup and included it in Hubitat. The device is seen with deviceType of 4 and a driver of "Ecolink Contact Sensor" ( TILT-ZWAVE2.5-ECO ). The state for contact seems to always be open
I have no experience debugging Z-Wave behavior but I'll try to give you all as much information as possible. I am on a C7 with version 2.2.3.142. Though the release notes said to manual update the radio firmware, it never indicated there was an update. I am hoping to use this.
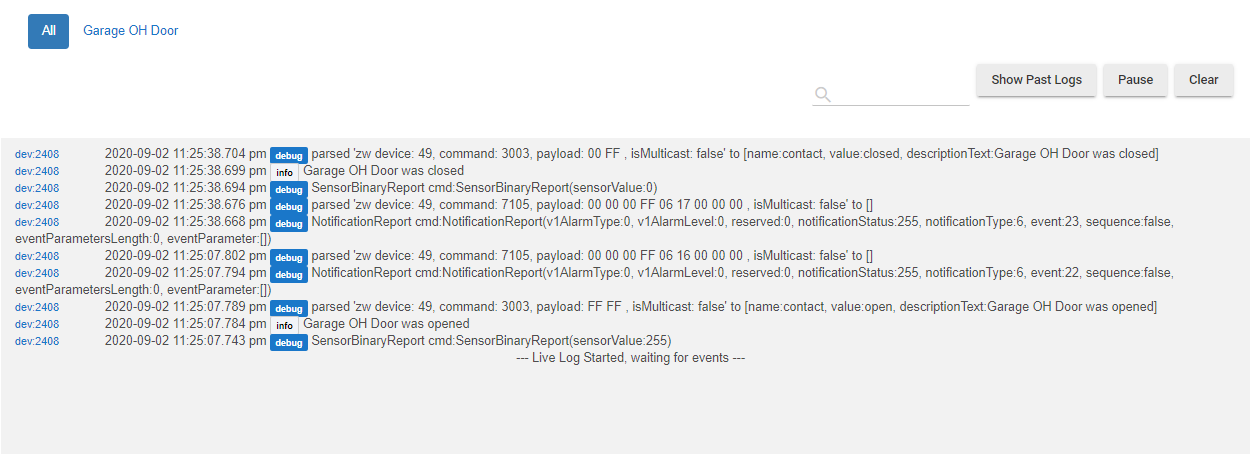
When I place the sensor in my hands in a way that would be open then shift to close and back (or the other way around, I don't remembeR) the log gives me the following:
dev:1712020-09-02 22:09:21.452 [ **debug** ](http://192.168.7.70/device/edit/171)parsed 'zw device: 0D, command: 3003, payload: FF FF , isMulticast: true' to null
dev:1712020-09-02 22:09:21.447 [ **debug** ](http://192.168.7.70/device/edit/171)parsed 'zw device: 0D, command: 7105, payload: 00 00 00 FF 06 16 00 00 00 , isMulticast: true' to null
dev:1712020-09-02 22:09:08.346 [ **debug** ](http://192.168.7.70/device/edit/171)parsed 'zw device: 0D, command: 3003, payload: 00 FF , isMulticast: true' to null
dev:1712020-09-02 22:09:08.338 [ **debug** ](http://192.168.7.70/device/edit/171)parsed 'zw device: 0D, command: 7105, payload: 00 00 00 FF 06 17 00 00 00 , isMulticast: true' to null
I don't understand how to read the debug output but these payload of 00xFF and FFxFF for the 3003 (is it sensor binary report?) command seem close to what is described here as closed and open (https://www.nexiahome.com/wp-content/uploads/2017/06/Eco-Link_Tilt_ZWave_Plus_Manual_R1.04_021816kgs.pdf). I don't know what the 7105 command is either but I see the payload of 16 and 17 that seem to correspond to those close and open events discussed in the link for Notification Report of Access Control
As I said above, I use the Generic Zwave Contact Sensor. I don't know if the source code is available for the built-in drivers, I think I can kinda make sense of what those commands are, what the payload for them is but it seems the driver is looking for something else since it's not updating the state for "contact" to be closed, ever.
This worked on Smartthings out of the box and it seems to work for everyone else on Hubitat without issues. What am I doing wrong that the driver cannot match these payloads and commands to the right contact state?