I used the new file and converted it to ESP32 just like the last one. I changed the 1024 to 4096:
static st::PS_SoundPressureLevel sensor1(F("soundPressureLevel1"), 30, 0, PIN_SPL, 0, 4096, 0.0, 165.0, 50);
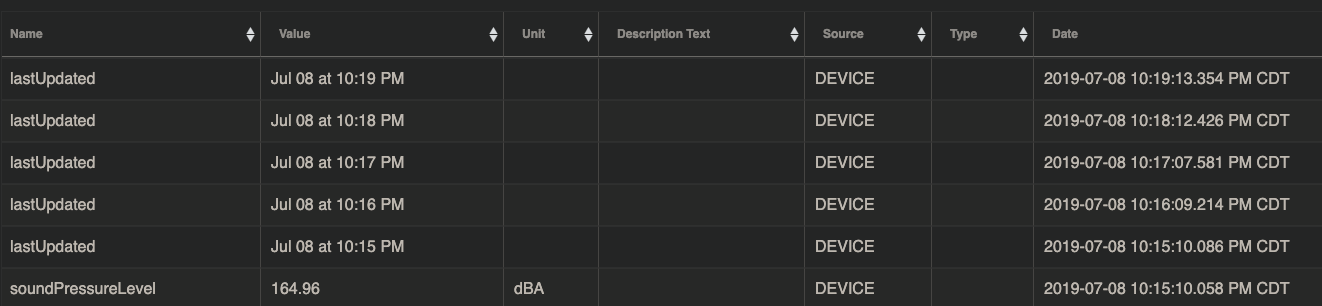
Still getting a pretty large value for the sound level, and only one update. Plus, it says 30 seconds above, but if you note the timestamps, it's only checking in once a minute.
How are you calculating the SPL? It should be the voltage * 50. I didn't see anywhere in your code where this was happening.
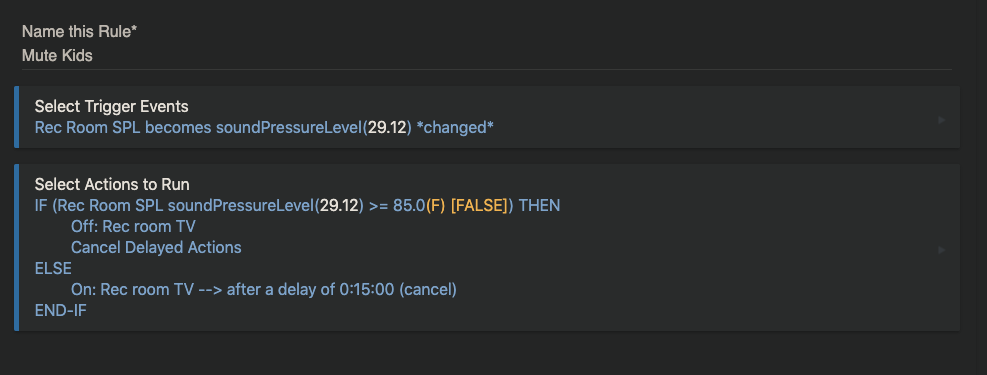
I was just thinking, when my kids become teenagers, this house is pretty much partyproof, unlike my parent's house was. 
Edit: hold up, looks like the pinout I was looking at might have been incorrect.
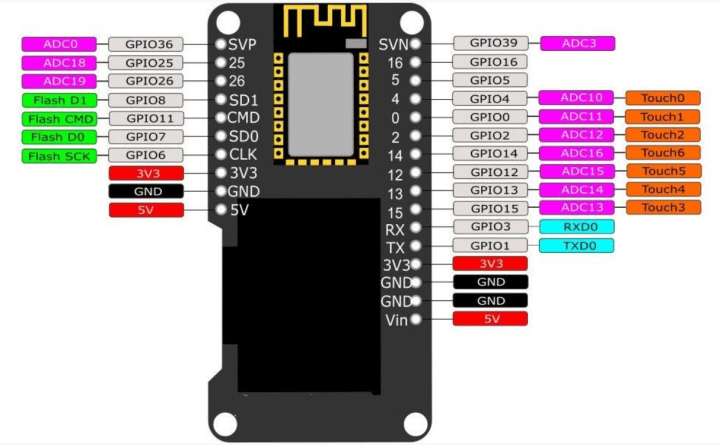
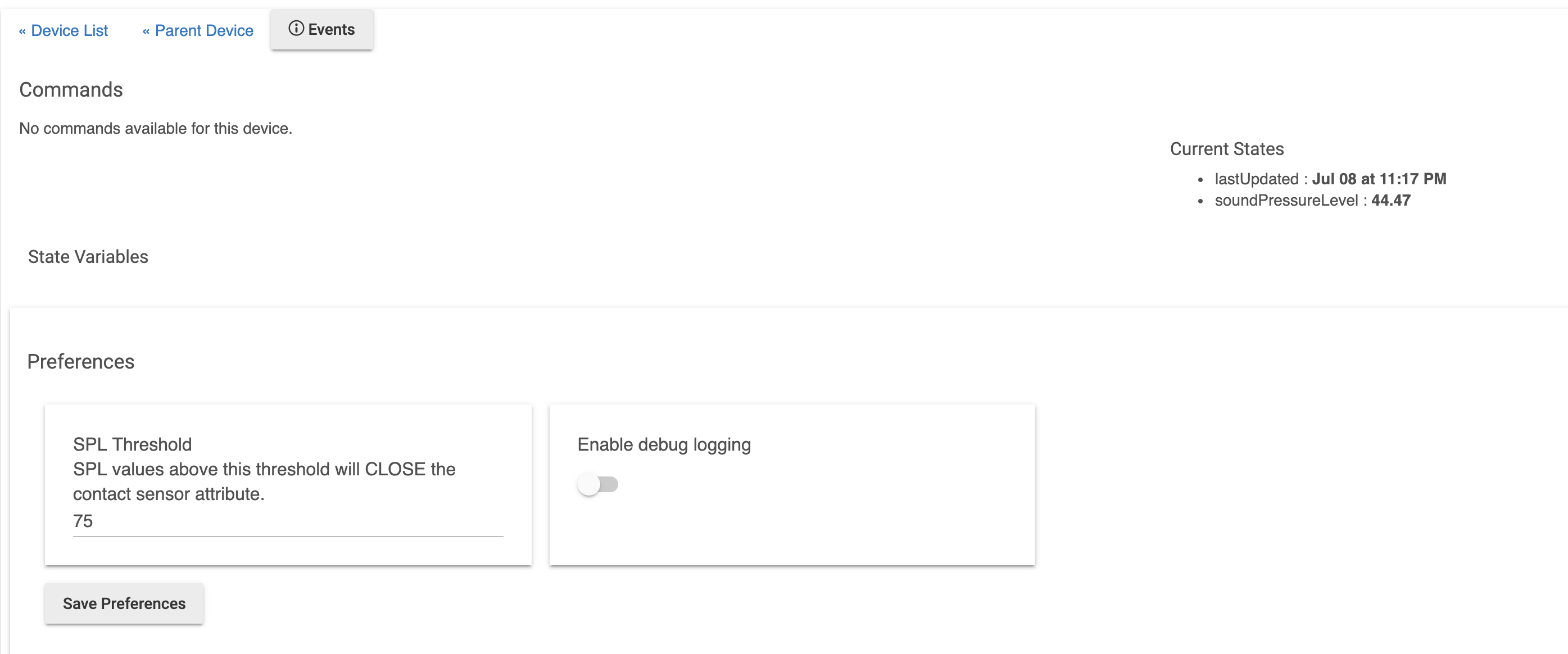
Edit 2: Looks like it's fine. The pinout image I was looking at for this board has 3 GND pins. But one of them on the board is labeled "SND". I switched it to another pin, but no change. I'm getting checkins, but no soundPressureLevel attribute updates.
Edit 3: Pin problem! I was using A19/pin 26. Switched it to pin 36 and now it works. Here's the pinouts for my board:
Here's the events:

If I change the polling interval to something like 1 or 2 seconds, what will happen? Is that all I need to change? Is it going to hammer my HE to death? In order to change behavior, I need the consequences to be pretty immediate.

 Thanks
Thanks 
