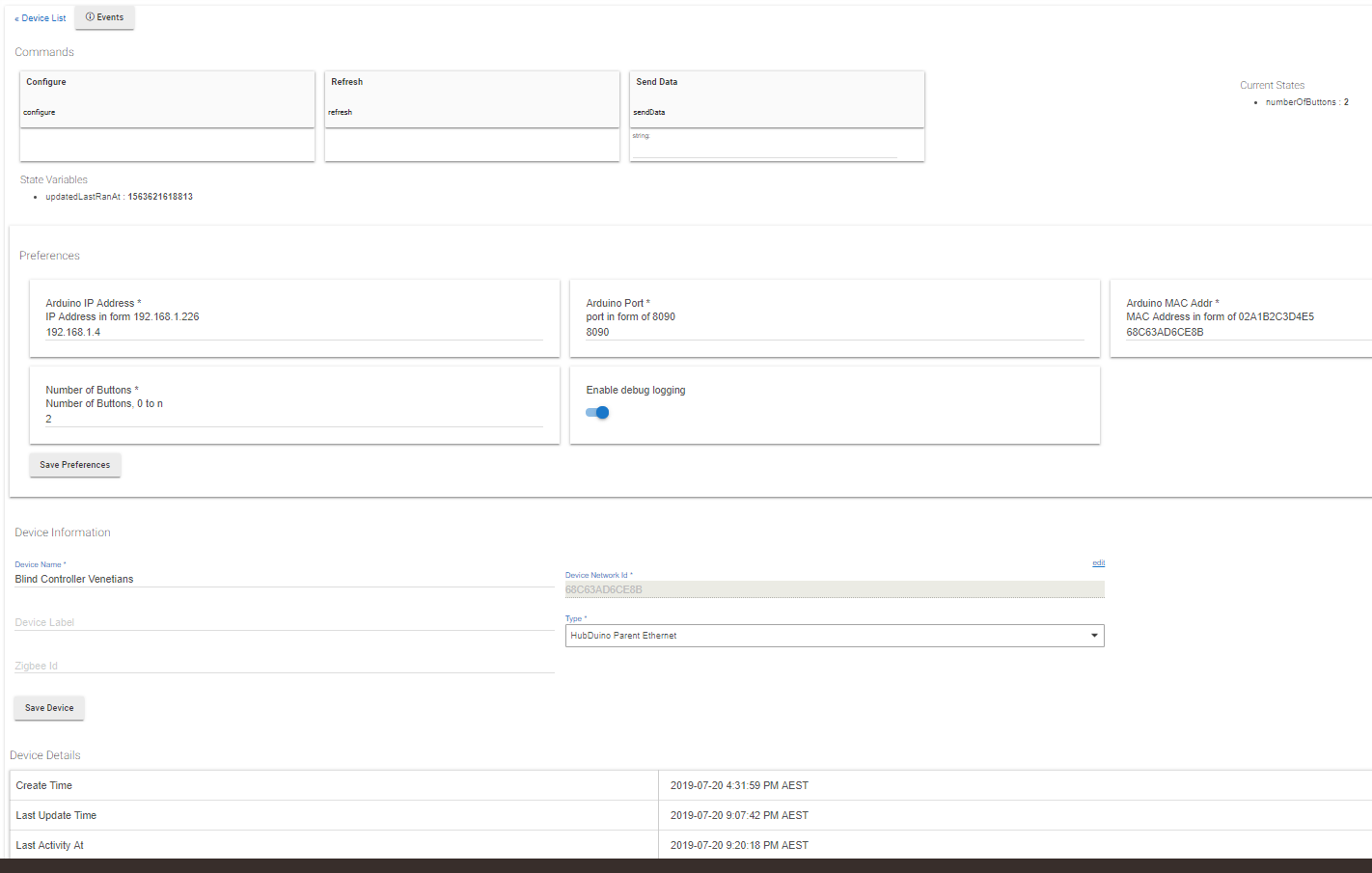
The commands are going through with senddata = "servo1 50:1000" but no signs of the child devices or any way to change the blinds other than sending that string.
//******************************************************************************************
// File: ST_Anything_Servos_ESP8266WiFi.ino
// Authors: Dan G Ogorchock & Daniel J Ogorchock (Father and Son)
//
// Summary: This Arduino Sketch, along with the ST_Anything library and the revised SmartThings
// library, demonstrates the ability of one NodeMCU ESP8266 to
// implement a multi input/output custom device for integration into SmartThings.
// The ST_Anything library takes care of all of the work to schedule device updates
// as well as all communications with the NodeMCU ESP8266's WiFi.
//
// ST_Anything_Servos implements the following ST Capabilities as a demo of what is possible with a single NodeMCU ESP8266
// - 2 x Servo Motor devices (using PWM output) - these utilize the "Switch Level" Capability
//
// Change History:
//
// Date Who What
// ---- --- ----
// 2018-06-24 Dan Ogorchock Original Creation
//
//******************************************************************************************
//******************************************************************************************
// SmartThings Library for ESP8266WiFi
//******************************************************************************************
#include <SmartThingsESP8266WiFi.h>
//******************************************************************************************
// ST_Anything Library
//******************************************************************************************
#include <Constants.h> //Constants.h is designed to be modified by the end user to adjust behavior of the ST_Anything library
#include <Device.h> //Generic Device Class, inherited by Sensor and Executor classes
#include <Sensor.h> //Generic Sensor Class, typically provides data to ST Cloud (e.g. Temperature, Motion, etc...)
#include <Executor.h> //Generic Executor Class, typically receives data from ST Cloud (e.g. Switch)
#include <InterruptSensor.h> //Generic Interrupt "Sensor" Class, waits for change of state on digital input
#include <PollingSensor.h> //Generic Polling "Sensor" Class, polls Arduino pins periodically
#include <Everything.h> //Master Brain of ST_Anything library that ties everything together and performs ST Shield communications
#include <EX_Servo.h> //Implements Executor (EX)as an Switch Level capability via a PWM output to a servo motor
//*************************************************************************************************
//NodeMCU v1.0 ESP8266-12e Pin Definitions (makes it much easier as these match the board markings)
//*************************************************************************************************
//#define LED_BUILTIN 16
//#define BUILTIN_LED 16
//
//#define D0 16 //no internal pullup resistor
//#define D1 5
//#define D2 4
//#define D3 0 //must not be pulled low during power on/reset, toggles value during boot
#define D4 2 //must not be pulled low during power on/reset, toggles value during boot
#define D5 14
//#define D6 12
//#define D7 13
//#define D8 15 //must not be pulled high during power on/reset
//******************************************************************************************
//Define which Arduino Pins will be used for each device
//******************************************************************************************
#define PIN_SERVO_1 D4 //SmartThings Capabilty "Switch Level"
#define PIN_SERVO_2 D5 //SmartThings Capabilty "Switch Level"
//******************************************************************************************
//ESP8266 WiFi Information
//******************************************************************************************
String str_ssid = "######"; // <---You must edit this line!
String str_password = "######"; // <---You must edit this line!
IPAddress ip(192, 168, 1, 4); //Device IP Address // <---You must edit this line!
IPAddress gateway(192, 168, 1, 1); //Router gateway // <---You must edit this line!
IPAddress subnet(255, 255, 255, 0); //LAN subnet mask // <---You must edit this line!
IPAddress dnsserver(192, 168, 1, 1); //DNS server // <---You must edit this line!
const unsigned int serverPort = 8090; // port to run the http server on
// Smartthings / Hubitat Hub TCP/IP Address
IPAddress hubIp(192, 168, 1, 25); // smartthings/hubitat hub ip // <---You must edit this line!
// SmartThings / Hubitat Hub TCP/IP Address: UNCOMMENT line that corresponds to your hub, COMMENT the other
const unsigned int hubPort = 39500; // smartthings hub port
//const unsigned int hubPort = 39501; // hubitat hub port
//******************************************************************************************
//st::Everything::callOnMsgSend() optional callback routine. This is a sniffer to monitor
// data being sent to ST. This allows a user to act on data changes locally within the
// Arduino sktech.
//******************************************************************************************
void callback(const String &msg)
{
// Serial.print(F("ST_Anything Callback: Sniffed data = "));
// Serial.println(msg);
//TODO: Add local logic here to take action when a device's value/state is changed
//Masquerade as the ThingShield to send data to the Arduino, as if from the ST Cloud (uncomment and edit following line)
//st::receiveSmartString("Put your command here!"); //use same strings that the Device Handler would send
}
//******************************************************************************************
//Arduino Setup() routine
//******************************************************************************************
void setup()
{
//******************************************************************************************
//Declare each Device that is attached to the Arduino
// Notes: - For each device, there is typically a corresponding "tile" defined in your
// SmartThings Device Handler Groovy code, except when using new COMPOSITE Device Handler
// - For details on each device's constructor arguments below, please refer to the
// corresponding header (.h) and program (.cpp) files.
// - The name assigned to each device (1st argument below) must match the Groovy
// Device Handler names. See the ReadMe for specifics!
// - The new Composite Device Handler is comprised of a Parent DH and various Child
// DH's. The names used below MUST not be changed for the Automatic Creation of
// child devices to work properly. Simply increment the number by +1 for each duplicate
// device (e.g. servo1, servo2, servo3, etc...) You can rename the Child Devices
// to match your specific use case in the ST Phone Application.
//******************************************************************************************
//Polling Sensors
//Interrupt Sensors
//Special sensors/executors (uses portions of both polling and executor classes)
//Executors
static st::EX_Servo executor1(F("servo1"), PIN_SERVO_1, 90); //last argument is the starting angle for the servo (0-180)
static st::EX_Servo executor2(F("servo2"), PIN_SERVO_2, 90); //last argument is the starting angle for the servo (0-180)
//*****************************************************************************
// Configure debug print output from each main class
// -Note: Set these to "false" if using Hardware Serial on pins 0 & 1
// to prevent communication conflicts with the ST Shield communications
//*****************************************************************************
st::Everything::debug=true;
st::Executor::debug=true;
st::Device::debug=true;
st::PollingSensor::debug=true;
st::InterruptSensor::debug=true;
//*****************************************************************************
//Initialize the "Everything" Class
//*****************************************************************************
//Initialize the optional local callback routine (safe to comment out if not desired)
st::Everything::callOnMsgSend = callback;
//Create the SmartThings ESP8266WiFi Communications Object
//STATIC IP Assignment - Recommended
st::Everything::SmartThing = new st::SmartThingsESP8266WiFi(str_ssid, str_password, ip, gateway, subnet, dnsserver, serverPort, hubIp, hubPort, st::receiveSmartString);
//DHCP IP Assigment - Must set your router's DHCP server to provice a static IP address for this device's MAC address
//st::Everything::SmartThing = new st::SmartThingsESP8266WiFi(str_ssid, str_password, serverPort, hubIp, hubPort, st::receiveSmartString);
//Run the Everything class' init() routine which establishes WiFi communications with SmartThings Hub
st::Everything::init();
//*****************************************************************************
//Add each sensor to the "Everything" Class
//*****************************************************************************
//*****************************************************************************
//Add each executor to the "Everything" Class
//*****************************************************************************
st::Everything::addExecutor(&executor1);
st::Everything::addExecutor(&executor2);
//*****************************************************************************
//Initialize each of the devices which were added to the Everything Class
//*****************************************************************************
st::Everything::initDevices();
}
//******************************************************************************************
//Arduino Loop() routine
//******************************************************************************************
void loop()
{
//*****************************************************************************
//Execute the Everything run method which takes care of "Everything"
//*****************************************************************************
st::Everything::run();
}![Device_hubduino|690x439]
(upload://5LYruNM9lJg0nZzPwx8W41sSSyz.png)
")
 I hadn't really considered the homing aspect of the stepper motors, which, in a typical application which would probably be handled with a limit switch or sensor--ditto for an over travel limit. Clearly, this isn't an arrangement that can easily be incorporated in a blind headrail.
I hadn't really considered the homing aspect of the stepper motors, which, in a typical application which would probably be handled with a limit switch or sensor--ditto for an over travel limit. Clearly, this isn't an arrangement that can easily be incorporated in a blind headrail.
