I might have found a working solution for myself.
I've added fully open and fully closed contact sensors - fairly definitive for status.
I created a GV to determine whether my door is open, closed, moving (using multisensor acceleration), stopped, or invalid (both sensors closed).
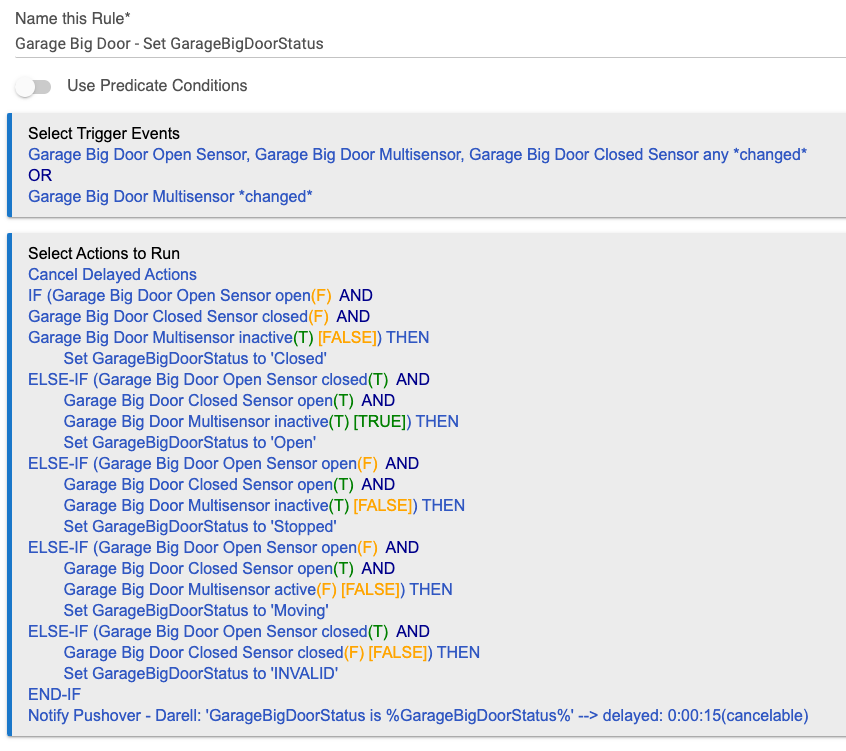
The cancel and pushover are just there for testing.
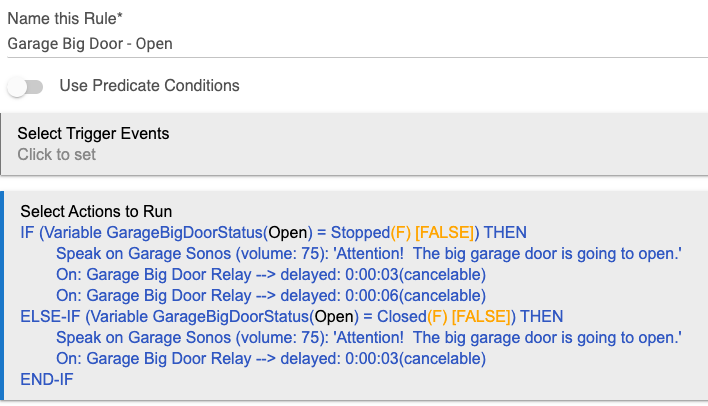
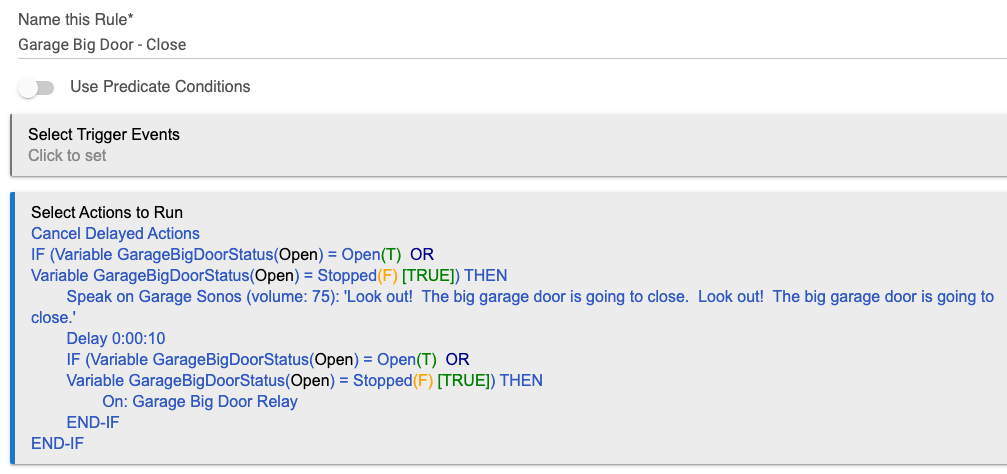
Then using the GV I use RM to determine current status and if "open" is requested it will open if closed or stopped. If "close" is requested it will close if it is open or stopped. And I was able to add in an audible warning (using sonos in garage) and plan to add visual for closing (waiting for Zigbee colored bulb to arrive).
Then my arrival/departure/bedtime routines call the actions from these two vice calling garage open/close to the GDO.
Now I just have to depart/arrive a few times and see if it is stable. The multisensors are still being flakey on open/close status, not sure why, but it definitely messes with Zooz GDO (because Zooz relies on single sensor to determine status). Oh and I did switch back to Zooz GDO vice LGK - meh.
As always, I'm very open to any feedback - esp RM stuff - if there is better logic, I'm all for it.

